freertos操作系统_仓储系统_学ucos还是free rtos(4)
电脑杂谈 发布时间:2017-02-05 14:18:38 来源:网络整理priority get an equal share of the processor time. */
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopReadyPriority ] ) );
在当型循环(while loop)开始之前,uxTopReadyPriority就被确保大于或等于优先级最高的就绪任务。while()循环从优先级uxTopReadyPriority开始,循环走下去从pxReadyTasksLists[]数组里找到就绪任务优先级最高的那个。接着listGET_OWNER_OF_NEXT_ENTRY()就抢占那个就绪列表中优先级最高的下一个就绪任务。
现在pxCurrentTCB指向了优先级最高的任务,并且当vTaskSwitchContext()返回硬件相关代码时开始运行那个任务。
那九行代码是FreeRTOS的绝对核心。其余FreeRTOS的8900行代码都是用来确保那九行代码,全都是用来保持优先级最高任务的运行的。
图3.2是一个大致的就绪列表看起来像什么的图。这个例子有三个优先级,有一个优先级为0的任务,没有优先级为1的任务,和三个优先级为2的任务。这张图是准确的,但不完整的;它的少掉一些细节,我们稍后将补充。
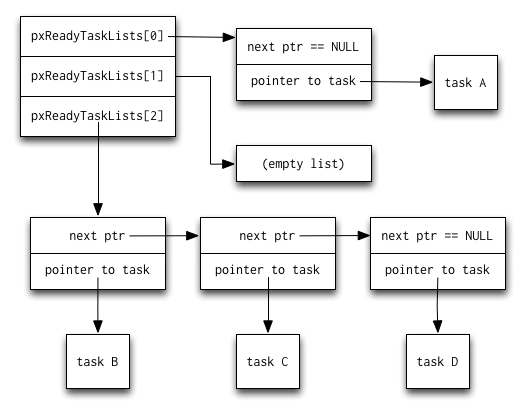
图3.2:FreeRTOS的就绪列表的基本视图
现在我们有了大致概述的方式,让我们去深究它的细节。我们将着于三个主要FreeRTOS的数据结构:任务,列表和队列。
3.4. 任务
所有操作系统的主要工作是运行和协调用户任务。像多数操作系统一样,FreeRTOS中的基本工作单元是任务。FreeRTOS的使用任务控制块(TCB)来表示每个任务。
任务控制块(TCB)
TCB的在tasks.c定义是这样的:
typedef struct tskTaskControlBlock
{
volatile portSTACK_TYPE *pxTopOfStack; /* Points to the location of
the last item placed on
the tasks stack. THIS
MUST BE THE FIRST MEMBER
OF THE STRUCT. */
xListItem xGenericListItem; /* List item used to place
the TCB in ready and
blocked queues. */
xListItem xEventListItem; /* List item used to place
the TCB in event lists.*/
unsigned portBASE_TYPE uxPriority; /* The priority of the task
where 0 is the lowest
priority. */
portSTACK_TYPE *pxStack; /* Points to the start of
the stack. */
signed char pcTaskName[ configMAX_TASK_NAME_LEN ]; /* Descriptive name given
to the task when created.
Facilitates debugging
only. */
#if ( portSTACK_GROWTH > 0 )
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/jisuanjixue/article-30698-4.html
-

-
朱天祥
呵呵
-
卢巍
公司送来的是合格的
 笔记本换硬盘后如何装系统?
笔记本换硬盘后如何装系统? 【jy135】台式机使用usb无线网卡网速慢解决方法
【jy135】台式机使用usb无线网卡网速慢解决方法 月底结转会计分录!
月底结转会计分录! 日程安排软件
日程安排软件
反击苏联军”的气魄来