移动机器人的三项关键技术和现状
电脑杂谈 发布时间:2020-05-24 21:16:25 来源:网络整理
在机器人领域有许多问题需要研究移动机器人技术及其应用,其中涉及许多学科,例如计算机,传感器,人机交互和生物控制. 其中,环境感知,自主定位和运动控制是机器人技术的三个关键问题. 下面将详细讨论这三点.
环境意识
目前,在机器人的室内环境中,由于环境的可变性和光线的影响,基于激光雷达和其他传感器的移动机器人自主环境感知技术已经相对成熟,而在室外应用中,变化,环境感知任务相对复杂,需要更高的实时性能,使多传感器融合成为机器人环境感知中的一项主要技术任务.

使用单个传感器进行环境感知通常具有其无法克服的弱点,但是通过冗余和补充来自不同传感器的信息,多个传感器的有效融合几乎可以覆盖机器人的所有空间检测并改善机器人因此,将激光雷达传感器与超声波传感器,深度相机,防坠落传感器和其他传感器结合使用以获得距离信息,以实现机器人对周围环境的感知已成为各国学者的热门话题.

使用多传感器形成环境意识技术可以实现多源信息的同步,匹配和通信. 有必要研究解决多传感器交叉模式和跨尺度信息注册与融合的方法和技术. 但是在实际应用中,并不是使用的传感器类型越多越好. 对于机器人在不同环境中的特定应用,有必要考虑每个传感器数据的有效性和实时计算.
自动定位
要实现自主行走,定位也是移动机器人需要掌握的核心技术之一. 目前,GPS可以提供更高的全球定位精度,但是GPS有一定的局限性,GPS信号会出现在室内环境中. 虚弱等容易导致位置丢失.
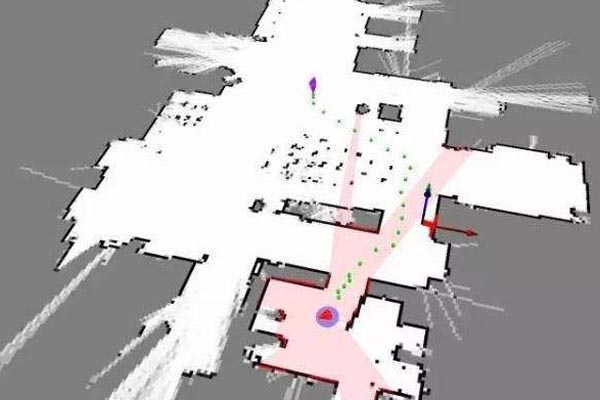
近年来,SLAM技术发展迅速,改善了移动机器人的定位和地图创建功能. SLAM是“同时定位和映射”的缩写. 它最初由Hugh Durrant-Whyte和John J. Leonard于1988年提出. SLAM不仅仅是一个概念,而是一种算法. 它被定义为“机器人从未知环境中的未知位置开始,并在移动过程中重复观察到的地图特征(例如拐角,立柱等)的解决方案. 找到您自己的位置和姿势,然后建立一个根据您的位置递增地图,以达到同时定位和构建地图的目的.
路径规划技术也是机器人研究的重要分支. 最佳路径规划基于一个或一些优化标准(例如最低工作成本,最短步行路线,最短步行时间等),在机器人工作空间中找到从起始状态到目标状态的路径,这可以避免障碍最佳路径.
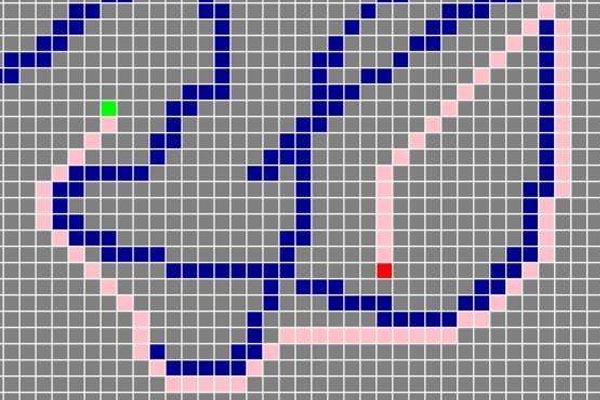
根据对环境信息的掌握程度,机器人路径规划可以分为全局路径规划和局部路径规划.
全局路径计划是在已知环境中为机器人计划路径. 路径规划的准确性取决于环境获取的准确性. 全局路径规划可以找到最佳解决方案,但是您需要提前了解环境的准确信息. 当环境变化时(例如未知障碍物),此方法将无能为力. 这是一种事前计划,因此不需要机器人系统的实时计算能力. 尽管规划结果是全局的并且更好,但是对于环境模型中的错误和噪声并没有足够的鲁棒性.

对于局部路径规划,环境信息是完全未知或部分已知的,重点是考虑机器人的当前局部环境信息,从而使机器人具有良好的避障能力,并且可以通过以下方式检测机器人的工作环境: 传感器以获取障碍物. 诸如此类系统的位置和几何属性之类的信息. 这样的计划需要收集环境数据,并且可以随时纠正环境模型的动态更新. 本地计划方法集成了环境的建模和搜索功能,需要高速机器人系统. 信息处理和计算功能对环境错误和噪声具有很高的鲁棒性,并且可以为计划结果提供实时反馈和校正. 但是,由于缺乏全球环境信息,规划结果可能不是最佳的,甚至可能会找到. 没有正确的路径或完整路径.
全局路径规划和本地路径规划之间没有本质区别. 改进后的局部路径规划也可以采用许多适合全局路径规划的方法,改进后的局部路径规划也可以采用适合全局路径规划的方法. 两者一起工作,机器人可以更好地规划从起点到终点的步行路径.
感知,定位和路径规划技术的现状如何?
为了解决机器人自主行走的问题,国内很少有公司研究环境感知,自主定位和路径规划等技术. 作为中国最早的机器人定位和导航技术,士兰科技在实现机器人自主行走方面已经越来越受欢迎,诸如阿波罗这样的成熟产品可以帮助公司降低研发成本,并配备了激光雷达传感器,超声波传感器传感器和防摔传感器. 并在机箱上配置深度相机传感器. 同时,它与自主研发的SLAMWARE自主导航定位系统配合使用,使机器人能够实现独立的地图导航功能.
当Apollo处于未知环境中时,无需修改环境,请使用SharpEdgeTM精致的合成技术构建具有超高分辨率的高精度厘米级地图,而不会累积错误. 同时,使用D *动态实时路径规划算法查找路径并移动到指定位置,而无需进行二次优化和修改,可以直接满足人们的使用期望.

此外移动机器人技术及其应用,基于纯软件方法,不需要其他辅助铺设. 可以将Apollo设置为预定路线,或者通过设置虚拟墙和虚拟轨道来防止Apollo进入工作受限区域.
在工作过程中,当Apollo的电量太低时,它可以支持外部调度的自主充电和导航,并自动返回充电站进行充电.
此外,Apollo的扩展接口还集成了网络端口,电源接口和各种控制接口,因此用户可以快速进行开发和扩展. 阿波罗可以通过有线网络或WIFI与外界进行通信. 它自己的电池可以为自身和外部扩展模块供电. 用户可以通过各种控制界面来控制整个Apollo及其上层扩展模块.
简而言之,近年来,各国政府高度重视机器人技术的发展,并投入了大量资源来激发机器人公司继续创新和进取. 我相信,未来,机器人也将成为人们日常生活的重要组成部分,并带领人们迈向更便捷的时代!
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-220943-1.html
-

-
冯圣利
我们就出兵叙利亚对美国支持武装份子往死里狂轰滥炸出一口窝囊气
-
![qq空间音乐克隆[处理格式]](http://p2.so.qhmsg.com/t013b6de628671550f7.jpg) qq空间音乐克隆[处理格式]
qq空间音乐克隆[处理格式]![18位ID号码检测[排序版本]](http://n1.itc.cn/img8/wb/smccloud/recom/2015/11/14/144745926004672243.JPEG) 18位ID号码检测[排序版本]
18位ID号码检测[排序版本] 揭开各国网络空间安全战略神秘面纱: 美国在世界上保持绝对优势,突出了自己的特征
揭开各国网络空间安全战略神秘面纱: 美国在世界上保持绝对优势,突出了自己的特征
这个是真的