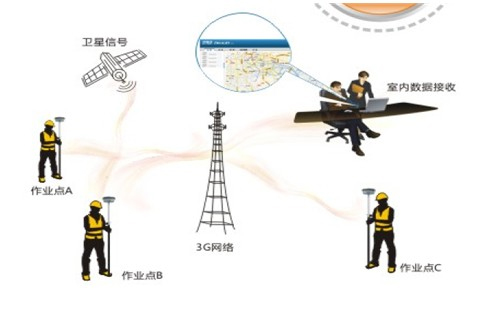
差分gps原理 UAV-381-——给你不一样的航测无人机(2)
电脑杂谈 发布时间:2018-02-11 00:49:32 来源:网络整理(2)更加精细化的数据预处理策略,针对无人机飞行过程中动态性强的特点,采用精细化粗差周跳处理及随机模型策略,保证飞行过程中解算结果的连续稳定;
(3)配置参数智能化,用户无需进行解算配置,直接点击解算,即可得到理想结果。差分gps原理
(4)截取拍照点前后一段时间数据进行解算,提高解算效率,并对解算过程进行实时显示,提供解算状态及剩余时间灯信息,方便用户实时监控解算进度;
(5)增加拍照点显示及最终结果报告,可让用户在解算后更为直观的了解解算效果,并进行更为细致的结果评定。

案例一

固定翼1:500免像控
飞行地点:天津宝坻
飞机型号:iFLY U5R
飞行高度:287m架构航线高度327m
影像分辨率:4.2cm
相机型号:SonyA7r
数据情况:
测区覆盖面积8平方公里、像片数量1805张、相重叠80%、旁相重叠65%、测区内布设12个检查点(其中有一个点由于区域影像拉花未使用),通过天津CORS采集西安80坐标、采用后差分方式记录高精度POS数据。

有架构航线图

检查点分布图
数据处理方法:
1、架构航线参与解算
利用UAV-软件解算地面基站与机载模块数据得到高精度POS,在零像控基础上基于该高精度POS进行空三解算,得到10cm分辨率影像图,在该影像图上检查GPS测点精度,如下图所示:

检查点精度X方向8.6cm,Y方向11.7cm,Z方向12.9cm。
从表中可以看出,平面及高程误差均能满足1:500地形图测绘要求。

案例二

倾斜旋翼1:500免像控
不同影像分辨率数据分别对应不同测试目的,其中重点测试了1.5cm和3cm分辨率影像数据。1.5cm分辨率的影像主要测试模型精度是否能满足地籍测量精度要求(平面位置中误差5cm);3cm分辨率的影像主要测试在免像控的情况下,模型精度是否能满足1:500地形图测绘的精度要求;5cm分辨率影像主要测试普通建模质量情况。
10月30日—11月5日,我们利用DP-Smart分别对三种不同分辨率的影像进行了空三解算、自动化建模,并对模型进行了精度检测,具体测试情况如下:
1.5cm分辨率影像
1.5cm分辨率影像测试方案是:在测试范围内,间隔100米左右布设一个像控点,空三解算后进行自动化建模。在模型上量测检查点坐标信息,通过检查点的中误差,判断模型精度是否能满足地籍测量精度要求(平面位置中误差5cm)。
本次测试范围有效面积约0.1km??,共布设控制点12个,使用检查点36个,测试区域范围(红色范围线)及像控点分布如下:

利用DP-Smart进行空三解算及自动化建模后,在模型上量测检查点坐标信息,对比精度如下:
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-70943-2.html
-

-
歌福尔
因为我们现在还打不过老美
-
长崎南
出兵叙利亚
-
 小米Max2最全面的评估不值得购买吗?
小米Max2最全面的评估不值得购买吗? 12V / 24v充电器_快速高效充电器
12V / 24v充电器_快速高效充电器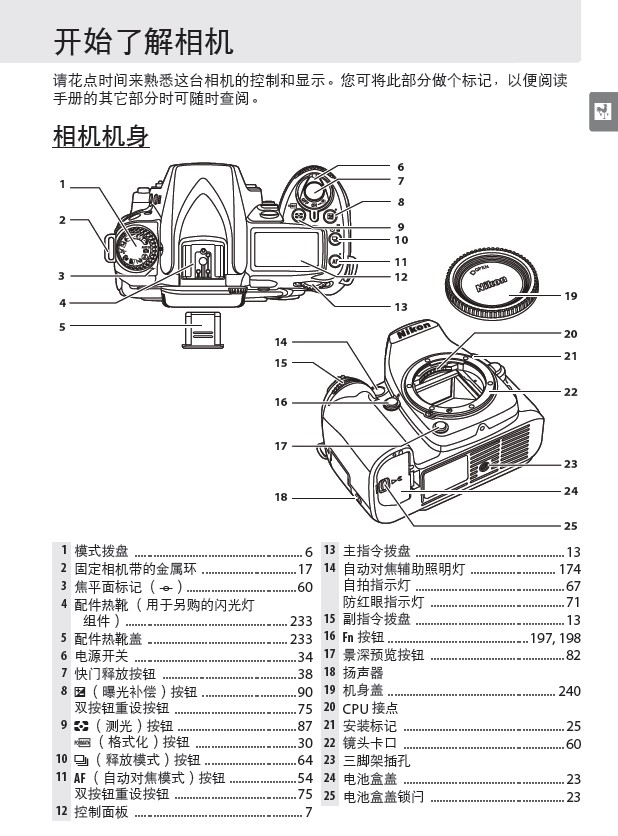 单反到底买尼康f75还是CANON 300V,对比测评一目了然!
单反到底买尼康f75还是CANON 300V,对比测评一目了然!
除非对方并不是通过而是在上面逗留或作出危害你家安全的事情