现代雷达系统分析与设计(陈伯晓)第12章
电脑杂谈 发布时间:2020-06-26 23:06:00 来源:网络整理
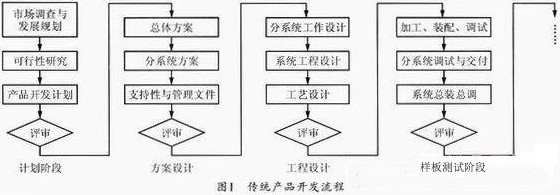
第12章雷达系统设计案例? 12.1? 12.2? 12.3? 12.41设计雷达是一个非常复杂的过程. 本章首先简要概述了雷达系统设计的一般过程,然后介绍了地面雷达,终端制导雷达和阵列雷达的设计案例,并在介绍这些案例的同时着重介绍了雷达信号处理的设计. 它着重于前两种情况,最后一种情况给出了阵列雷达测量数据的分析结果. 具体的设计过程和计算机仿真留给读者进行练习. 212.1雷达系统设计的一般过程雷达设计首先根据雷达的任务确定雷达的工作频段和工作频率范围;然后根据雷达的战术技术指标确定雷达系统和主要技术;计算指标,确定子系统的性能指标,并设计,处理和测试子系统;最后,调试,测试和测试整个雷达. 雷达系统设计的总体流程如图12.1所示. 第1章介绍了雷达的战术技术指标,第2章介绍了每个子系统的指标,在此不再赘述. 以下是案例介绍. 3图12.1雷达系统的一般设计过程412.2设计地面导航雷达系统是为了设计地面导航雷达,它要求分别检测高度为7 km和2 km的飞机和导弹,以及飞机和飞机的最大探测距离. 导弹分别为50公里和90公里.
假设飞机的平均RCS和导弹的平均RCS分别为6 dBsm(σa= 4 m2)和-10 dBsm,雷达工作频率f = 3 GHz. 假设雷达使用抛物面天线,方位角波束宽度小于3°的扇形波束,在方位角维度上进行5θA= 360°的机械扫描,扫描速度为2 s圈. 假设噪声系数F = 6 dB,总损耗因子L = 8 dB,检测阈值为SNR = 15 dB(检测概率Pd = 0.99,虚警概率Pfa = 10-7). 在搜索模式下,距离分辨率为75 m. 如图12.2所示,到目标的最小拦截距离要求为Rmin = 30 km. 6图12.2雷达与其威胁之间的几何关系7步骤1确定单个脉冲的脉冲重复频率,天线孔径和峰值功率. 根据测距分辨率为ΔR= 75 m,所需带宽B = c(2ΔR)= 2 MHz的要求,发送的脉冲宽度为τ= 0.5μs. 从图12.2知道,(12.2.1)(12.2.2)8因此,假设仰角覆盖角ΘE= 11°,则雷达的搜索区域为(12.2.3)天线必须具有扇形波束,因此请使用抛物线形矩形天线. 考虑到机动性的要求,天线的有效面积选为Ae = 2.25 m2. 如果孔径效率为ρ= 0.8,则天线的物理孔径面积为(12.2.4). 9天线的增益为(12.2.5). 宽度是θe=θE= 11°. 根据(ȡk= 1)(12.2.6)10,为了确保至少90 km的无模糊距离,最大PRF为(12.2.7). 因此,选择fr = 1000 Hz雷达系统分析与设计,脉冲重复周期Tr = 1000μs.
在一次扫描中在波束宽度内辐射到目标的脉冲数为(12.2.8),其中天线扫描速度为11 = 180°. 因此,可以对一个波位置的7个脉冲进行非相干累加或相干累加,以减小单个脉冲的峰值功率. 如果使用非相干累加,则使用7个脉冲进行非相干累加,以达到所需的SNR = 15 dB,并使用公式(8.3.15)进行计算. 当Pd = 0.99且Pfa = 10-7时,使用7个脉冲. 非相干累积的改进因子约为(12.2.9)12,这意味着单个脉冲所需的SNR为(12.2.10). 因此,与检测导弹和飞机相对应的单个脉冲的能量为(12.2.11)13(12.2.12). 因此,如果脉冲宽度为0.5μs,则检测单个脉冲所需的峰值功率为两种目标类型均为(12.2.13)14考虑7个脉冲累积的雷达方程为(12.2.14)(12.2.15)15图12.3在累积和非累积下SNR与两个目标之间的距离之间的关系16图图12.3显示了在累积和非累积条件下,SNR与两个目标之间的距离之间的关系. 从图中可以看出,在脉冲积累之后,在导弹和飞机的最大射程上可以达到SNR = 15 dB的要求. 如果飞机和导弹目标分别受到Swerling I和Swerling III的约束,则17Step2考虑目标的RCS波动效应.

假定在最大工作距离上需要Pd≥0.99,并且Pfa = 10-7或更好. 计算目标波动时获得相同检测性能所需的附加SNR. 步骤3假设使用LFM信号,并且在搜索模式和跟踪模式下雷达的分辨率ΔR分别为75 m和7.5 m. 雷达的工作率要求小于10%,最小工作距离Rmin≥15 km. 设计雷达的波形参数,并给出其中一个波形的模糊图片. 根据最小工作距离Rmin≥15km,从公式(12.2.13)知道雷达18的最大脉冲宽度(12.2.16). 如果使用窄脉冲雷达系统分析与设计,则发射的峰值功率太大. 如果单个脉冲的峰值功率不超过20 kW,则最小脉冲宽度为(12.2.17). 因此,选择发射脉冲宽度τ=80μs,搜索和跟踪模式的FM带宽分别为B = 2 MHz和B = 20 MHz,Tr = 1 ms,τ/ Tr = 0.08,满足工作比的要求小于10%. 19Step4如果两个目标之间的最小距离为150m,则仿真将验证多个目标的分辨能力. 结合脉冲压力改善信噪比的仿真分析,设计了脉冲压缩处理方案. 假设两个目标之间的距离分别为75 km和75.15 km,则输入SNR为0 dB. 图12.4显示了脉冲压力的仿真结果. 图(a)显示了脉压输入信号的实部. b)给出了脉压匹配滤波器信号的实部. 图(c)显示了脉冲压力输出结果. 图(d)是图(c)的局部放大图.
这表明雷达可以很好地区分这两个目标. 经过脉冲压力处理后,两个目标的SNR约为24 dB,并且脉冲压力将SNR提高了24 dB. 20图12.4脉冲压力的仿真结果21在搜索操作模式下,FM带宽为B = 2 MHz,如果采样率为4 MHz,则每个采样点之间的距离量化间隔为37.5 m. 如果考虑105 km的距离范围,则有2800个采样点,因此需要4096点频域脉冲压缩处理. 步骤5假设天线方向图是高斯,雷达的安装高度为5 m,峰值发射功率为20 kW,距离分辨率为75 m,请考虑天线SL的旁瓣电平= -20 dB,地面杂波散射系数σ0= -15 dB sm / sm,计算目标在不同距离进入雷达的杂波的RCS,以及信号,杂波和噪声(CNR,SNR,SIR)的功率比. 假设风速的均方根值σv为0.32m / s,则将2脉冲,3脉冲或4脉冲MTI用于杂波抑制并计算改善因子. 22根据方程(6.2.21),可以计算出目标是导弹和飞机时进入雷达的杂波RCS,如图12.5所示. 可以看出,杂波的RCS约为几分贝,约为10 dB / sm. 图12.6分别显示了导弹和飞机的单脉冲回波的CNR,SNR和SIR(信噪比加噪声功率比).
可以看到,导弹目标在50 km处的SIR约为-10dB. 为了达到15dB的检测SIR要求,需要采取措施抑制杂波. 23图12.5杂波的RCS 24图12.6根据上述雷达参数确定的单脉冲回波的CNR,SNR和SIR25: fr = 1000 Hz,天线扫描速率Tscan = 2 s,波束宽度θa= 1.33°,杂波频谱宽均方根值为(12.2.18)(12.2.19)因此,杂波频谱的总均方根带宽为26(12.2.20). 使用2脉冲,3脉冲或4脉冲MTI抑制杂波以改善干扰因素是(12.2.21)(12.2.22)(12.2.23)2712.3终端制导雷达系统的设计导弹机载终端制导雷达的设计系统: 明确的检测距离为80 km;工作率不超过20%;波长λ= 3cm;天线等效孔径D = 0.25 m(直径);噪声系数F = 3 dB;系统损耗L = 4 dB;天线波束宽度θ3dB = 6°;目标RCSσ= 1500 m2. 之间的相对运动关系如图12.7所示. 目标速度Vs = 15m / s,导弹运动速度Va = 600m / s,目标航向与弹丸轴线方向之间的角度为28α′= 30°,目标与该方向之间的角度射弹轴线的角度为β= 1°,那么在舰船的位置P处,导弹到目标的视线与目标航向之间的角度α=α′+β.
从时间t = 0开始,导弹从O移到O'位置,目标从P移到P'位置. 此时,导弹的运动方向与目标之间的夹角为βi. 接收信号的处理流程如图12.8所示. 雷达采用LFM信号,在搜索和跟踪工作模式下的波形参数如表12.1所示. 29图12.7之间的相对运动关系30图12.8接收信号处理流程31表12.1搜索和跟踪工作模式下的波形参数32(1)使用线性调频信号来得出信号的模糊函数,并给出|χ的图(τ,fd)|,|χ(τ,0)|,|χ(0,fd)|,χ(τ,fd)| -4dB切割轮廓图. 线性调频信号的复包络可以表示为(12.3.1),其中a(t)= 1,(| t |≤τ'/ 2)是矩形脉冲函数,而τ'是脉冲宽度. 33线性调频脉冲信号的模糊度函数为(12.3.2)当fd = 0时,距离模糊度函数为(12.3.3)34当τ= 0(12.3.4)时图12.9显示了这些模糊度及其等效项高线图. 35图12.9模糊图36(2)计算天线的有效面积Ae和增益G. (12.3.5)(12.3.6)37(3)如果的带宽B = 10.3 MHz,则输出中频fIF = 60 MHz,线性动态范围DR-1 = 60 dB,A / DC最大输入信号电平2Vpp (峰峰值,50Ω负载),①计算的临界灵敏度Smin,输入的最大信号功率电平,最大输出信号功率电平和增益; ②选择合适的A / DC并估算A / D噪声对. 系统噪声系数的影响.
①接收机的临界灵敏度为(12.3.7)38接收机输入处的最大信号功率(即1dB增益压缩点输入信号)功率电平为(12.3.8)接收机的最大输出信号功率电平是(12.3.9)因此,的增益为Pout-1-Pin-1 = 10-(-41)= 51(dBm). 39②从接收机前端到A / D输入的噪声功率为PnR = -101 dBm + 51 dBm = -50dBm,转换为R =50Ω的A / D输入阻抗的均方噪声电压为(12.3 .10)A / D的均方噪声电压是SNR A / D的信噪比(可在设备手册中找到). 40根据IF正交采样定理,A / D的采样频率必须大于2B. 因此,fs = 48MHz. 考虑选择两个具有不同位数的A / D转换器: (i)选择AD9042 12位A / D转换器时,实际A / D的SNR为62dB,A / D的均方噪声电压D为(12.3. 11)(12.3.12)41A / DC对系统噪声系数的衰减为ΔFA/ D = 10 lg(M + 1)-10 lg(M)= 2.1165(dB),显然是ΔFA/ D太大,无法容忍. 因此,此A / DC不适合. (ii)当选择14位A / D转换器AD9244时,A / D的实际SNR为70 dB,则输入端A / D均方噪声电压与其均方噪声电压之比M阻抗为(12.3 .13)42(12.3.14)A / DC对系统噪声系数的衰减量为ΔFA/ D = 0.4(dB).
(4)如果天线在±45°范围内搜索并且扫描速度为60°/ s,则累积脉冲数N =?如果发现概率Pd = 90%,并且虚警概率Pfa = 10-6,则SNR =是否满足上述检测性能要求?在搜索状态下,如果使用64个脉冲进行相干累加,则计算所需的峰值辐射功率Pt =?. 如果Pt = 25W,则计算信噪比SNR与目标回波相干累积前后的距离之间的关系曲线(考虑信号处理的总损耗为5 dB). 43①天线扫描速度v = 60°/ s,天线波束宽度θ3dB = 6°,每个波位置的停留时间tint =θ3dB/ v = 6/60 = 0.1 s(12.3.15)如果需要发现概率Pd = 90%,虚警概率Pfa = 10-6,通过查找表来达到上述检测性能所需的最小信噪比为SNRo,min = 12.5 dB. ③如果使用M = 64脉冲相干累加,则计算所需的峰值辐射功率Pt. 44根据雷达方程,单脉冲回波信号的信噪比为M个脉冲相干累积的信噪比(12.3.16),则所需的峰值辐射功率为45(12.3.17) (Pt)dB = 12.4966(dBW),即,如果Pt = 25W,则目标回波相干累积前后信噪比SNR与距离之间的关系如图12.10所示. 46图12.10 SNR与距离的关系曲线47(5)给出了所用信号的匹配滤波器函数h(t)及其频谱H(f).
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-259590-1.html
 使用照相机拍摄远处的物体,切换到长焦距镜头并拍摄另一张照片,然后照相机对A成像. 图像距离不变.
使用照相机拍摄远处的物体,切换到长焦距镜头并拍摄另一张照片,然后照相机对A成像. 图像距离不变. 源于澳大利亚 吉利DSI 6AT变速器解读
源于澳大利亚 吉利DSI 6AT变速器解读 出乎意料:为什么某些Word文档打开后响应缓慢
出乎意料:为什么某些Word文档打开后响应缓慢 手机电池技术为什么不进步?
手机电池技术为什么不进步?
当然美帝没那么老实