canny边缘检测 c语言_canny边缘检测总结心得_opencv canny边缘检测(3)
电脑杂谈 发布时间:2017-02-22 21:16:12 来源:网络整理这里使用较为常用的Sobel算子计算X和Y方向上的梯度以及梯度的方向角,Sobel的X和Y方向的卷积因子为:
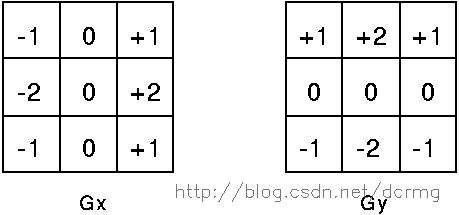
更多关于Sobel算子的介绍可以移步这里查看:
使用Sobel卷积因子计算X、Y方向梯度和梯度方向角代码实现:
//******************Sobel卷积因子计算X、Y方向梯度和梯度方向角********************
//第一个参数imageSourc原始灰度图像;
//第二个参数imageSobelX是X方向梯度图像;
//第三个参数imageSobelY是Y方向梯度图像;
//第四个参数pointDrection是梯度方向角数组指针
//*************************************************************
void SobelGradDirction(const Mat imageSource,Mat &imageSobelX,Mat &imageSobelY,double *&pointDrection)
{
pointDrection=new double[(imageSource.rows-1)*(imageSource.cols-1)];
for(int i=0;i<(imageSource.rows-1)*(imageSource.cols-1);i++)
{
pointDrection[i]=0;
}
imageSobelX=Mat::zeros(imageSource.size(),CV_32SC1);
imageSobelY=Mat::zeros(imageSource.size(),CV_32SC1);
uchar *P=imageSource.data;
uchar *PX=imageSobelX.data;
uchar *PY=imageSobelY.data;
int step=imageSource.step;
int stepXY=imageSobelX.step;
int k=0;
int m=0;
int n=0;
for(int i=1;i<(imageSource.rows-1);i++)
{
for(int j=1;j<(imageSource.cols-1);j++)
{
//通过指针遍历图像上每一个像素
double gradY=P[(i-1)*step+j+1]+P[i*step+j+1]*2+P[(i+1)*step+j+1]-P[(i-1)*step+j-1]-P[i*step+j-1]*2-P[(i+1)*step+j-1];
PY[i*stepXY+j*(stepXY/step)]=abs(gradY);
double gradX=P[(i+1)*step+j-1]+P[(i+1)*step+j]*2+P[(i+1)*step+j+1]-P[(i-1)*step+j-1]-P[(i-1)*step+j]*2-P[(i-1)*step+j+1];
PX[i*stepXY+j*(stepXY/step)]=abs(gradX);
if(gradX==0)
{
gradX=0.00000000000000001; //防止除数为0异常
}
pointDrection[k]=atan(gradY/gradX)*57.3;//弧度转换为度
pointDrection[k]+=90;
k++;
}
}
convertScaleAbs(imageSobelX,imageSobelX);
convertScaleAbs(imageSobelY,imageSobelY);
}
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/jisuanjixue/article-33925-3.html
相关阅读
发表评论 请自觉遵守互联网相关的政策法规,严禁发布、暴力、反动的言论
每日福利
 高性能计算机课_高性能计算机tc6000_曙光高性能计算机
高性能计算机课_高性能计算机tc6000_曙光高性能计算机 不属于计算机高级语言 转帖:《广西博白金圭塘王氏后裔王缉志》
不属于计算机高级语言 转帖:《广西博白金圭塘王氏后裔王缉志》 计算机黑屏一半,显示器一半正常,如何处理?估计要修理多少?
计算机黑屏一半,显示器一半正常,如何处理?估计要修理多少? 离散图形更好还是集成图形更好?离散图形和集成图形之间的区别
离散图形更好还是集成图形更好?离散图形和集成图形之间的区别热点图片
应该再9亿