canny边缘检测 c语言_canny边缘检测总结心得_opencv canny边缘检测(2)
电脑杂谈 发布时间:2017-02-22 21:16:12 来源:网络整理用在1.2中生成的高斯卷积核跟灰度图像卷积,得到灰度图像的高斯滤波后的图像,抑制噪声。
//******************高斯滤波*************************
//第一个参数imageSource是待滤波原始图像;
//第二个参数imageGaussian是滤波后输出图像;
//第三个参数gaus是一个指向含有N个double类型数组的指针;
//第四个参数size是滤波核的尺寸
//*************************************************************
void GaussianFilter(const Mat imageSource,Mat &imageGaussian,double **gaus,int size)
{
imageGaussian=Mat::zeros(imageSource.size(),CV_8UC1);
if(!imageSource.data||imageSource.channels()!=1)
{
return ;
}
double gausArray[100];
for(int i=0;i<size*size;i++)
{
gausArray[i]=0; //赋初值,空间分配
}
int array=0;
for(int i=0;i<size;i++)
{
for(int j=0;j<size;j++)
{
gausArray[array]=gaus[i][j];//二维数组到一维 方便计算
array++;
}
}
//滤波
for(int i=0;i<imageSource.rows;i++)
{
for(int j=0;j<imageSource.cols;j++)
{
int k=0;
for(int l=-size/2;l<=size/2;l++)
{
for(int g=-size/2;g<=size/2;g++)
{
//以下处理针对滤波后图像边界处理,为超出边界的值赋值为边界值
int row=i+l;
int col=j+g;
row=row<0?0:row;
row=row>=imageSource.rows?imageSource.rows-1:row;
col=col<0?0:col;
col=col>=imageSource.cols?imageSource.cols-1:col;
//卷积和
imageGaussian.at<uchar>(i,j)+=gausArray[k]*imageSource.at<uchar>(row,col);
k++;
}
}
}
}
}高斯滤波后的图像:
跟原图相比,图像有一定程度的模糊。
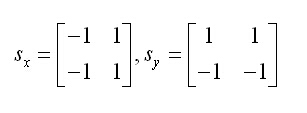
二、用Sobel等梯度算子计算梯度幅和方向
图像灰度的梯度可以使用最简单的一阶有限差分来进行近,使用以下图像在x和y方向上偏导数的两个矩阵:
计算公式为:
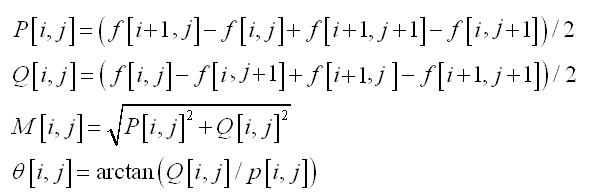
其中f为图像灰度,P代表X方向梯度幅,Q代表Y方向 梯度幅,M是该点幅,Θ是梯度方向,也就是角度。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/jisuanjixue/article-33925-2.html
相关阅读
发表评论 请自觉遵守互联网相关的政策法规,严禁发布、暴力、反动的言论
每日福利
 struts实现原理 struts2框架学习笔记3:获取servletAPI
struts实现原理 struts2框架学习笔记3:获取servletAPI 我的路由器无法ping通,但我可以连接到Internet,但有时它会变旧,一段时间后会变好
我的路由器无法ping通,但我可以连接到Internet,但有时它会变旧,一段时间后会变好 联想研发中心 上海标书投标文件√南宁
联想研发中心 上海标书投标文件√南宁 C# 多线程编程第一步
C# 多线程编程第一步热点图片
把自己的家慢慢败掉