电机原理与
电脑杂谈 发布时间:2020-03-30 11:09:18 来源:网络整理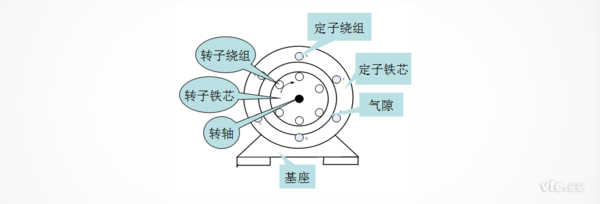
实现电能和机械能之间转换的电气设备统称为电动机. 电机利用电磁感应原理实现电能和机械能的相互转换. 将机械能转换为电能的装置称为发电机,而将电能转换为机械能的装置称为电动机.
交流电动机主要用于生产中,尤其是三相异步电动机,因为它具有结构简单,坚固耐用,运行可靠,价格低廉,维护方便的优点. 它被广泛用于驱动各种金属切削机床,起重机,锻压机,传送带,铸造机械,低功率风扇和水泵.
三相异步电动机的工作原理
长期实践和理论证明,如果在转子的圆周空间中放置3组彼此相距120°的绕组,则将这3组绕组以星形或三角形连接(图2). 星形连接)(3组绕组). 将3个绕组连接到三相AC电压. 三相交流电流流入三组绕组. 这三组绕组将产生类似于磁体的旋转磁场. 在该旋转磁场中的转子分别闭合. 导体产生感应电流,磁场在导体上施加力,电流流过该导体,推动每个导体向某个方向移动,转子也运行.
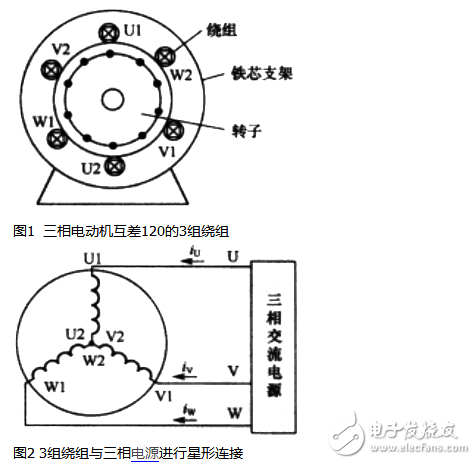

图1实际上是三相异步电动机的. 绕组缠绕在铁芯支架上. 由于绕组和铁芯都固定,因此称为定子,定子是笼型转子. 转子的旋转可以看作是由绕组产生的具有一定速度的旋转磁场所驱动. 旋转磁场的旋转速度n(也称为同步速度),三相交流电的频率f和磁极对数p(一对磁极具有两个不同的磁极)的数量如下: 关系: n = 60f / p.
例如,三相异步电动机的定子绕组的交流电压频率为f = 50Hz,定子绕组的极对数为p = 3,因此旋转磁场的旋转速度为n = 60×50÷3 = 1000r /分钟.
当电动机运行时,转子的旋转与旋转磁场的方向相同. 转子通过旋转磁场旋转. 转子的速度应小于旋转磁场的速度,并且应落后于旋转磁场的速度. 也就是说,转子的转速和旋转磁场是异步的. 这种转子速度与旋转磁场速度不同步的电动机称为异步电动机.
三相异步电动机的概述和结构
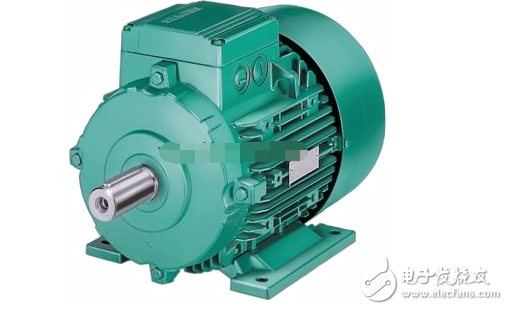
图3列出了两个三相异步电动机的物理外观.
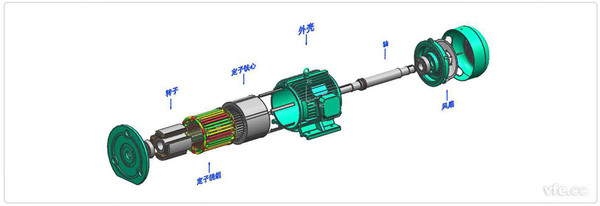
三相异步电动机的结构如图4所示. 从图中可以看出,它主要由壳体,定子,转子和其他零件组成.

三相异步电动机各部分的说明:
①壳
三相异步电动机的壳体主要由框架,轴承盖,端盖电动机原理与,接线盒,风扇和盖组成.
②定子

定子由定子铁芯和定子绕组组成.
a. 定子铁芯. 定子铁芯通常由堆叠在一起的许多环形硅钢板组成. 硅钢板上有许多小槽,用于插入定子绕组(也称为定子线圈). 硅钢板上涂有绝缘层,以使层压板之间保持绝缘.
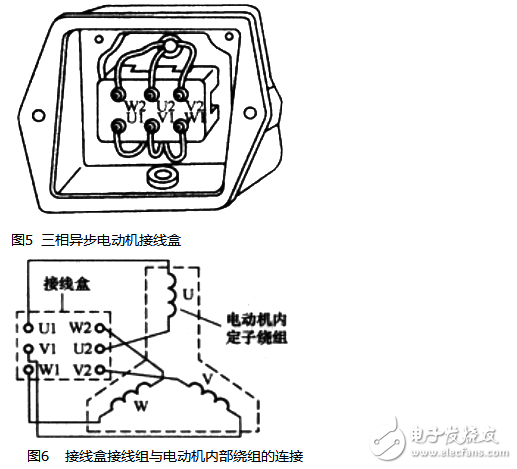
b. 定子绕组. 它通常由涂有绝缘漆的铜线制成,并且缠绕的铜线按照一定的规则插入定子铁心的小槽中,如图2的放大部分所示. 4.将绕组埋入小槽中后,按照某种方法将槽中的绕组连接起来,并连接到接线盒的U1,U2,V1,V2,W1和W2端子. 接线盒在图2中示出. 图5表示接线盒各端子与电动机内部绕组之间的连接关系. 6.
③转子
转子是电动机的运行部分. 它由转子芯,转子绕组和旋转轴组成.
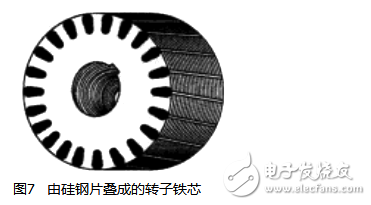
a. 转子铁芯. 如图1所示. 如图7所示,转子铁芯是通过在外圆上堆叠许多带有小凹槽的硅钢板形成的,这些小凹槽用于放置转子绕组.
b. 转子绕组. 转子绕组嵌入转子铁芯的一个小槽中. 转子绕组可分为笼型转子绕组和绕线型转子绕组.
笼式转子绕组是将金属导杆放入转子铁芯的小槽中,然后使用导环连接铁芯两端的导杆,以便任何一个导杆穿过其相应的引导栏. 两端的导向环构成一个封闭的绕组. 由于该绕组的形状像一个笼子,因此称为笼子转子绕组. 笼型转子绕组有两种类型: 铜棒转子绕组和铸铝转子绕组,如图8所示. 铜棒转子绕组由铜导棒制成,位于转子芯的小槽中,然后与金属端焊接两端都响而铸铝转子绕组是通过铸铝导杆,端环和叶片铸在铁芯上的.

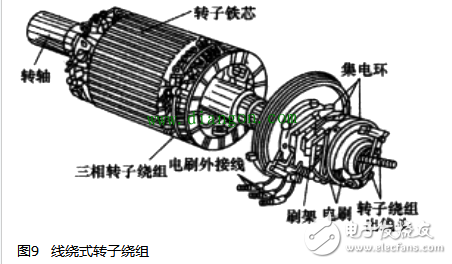
绕线式转子绕组的结构如图9所示. 将其包裹在转子铁心中,并按照一定的规则用绝缘线缠绕绕组,然后将绕组以三角形或星形连接方法,其中大多数以星形方式连接(图11). 绕组连接后,将3相线引出电动机原理与,并通过轴的内孔连接到轴的3个铜滑环(也称为滑环). 滑环与轴工具一起运行,滑环与固定电刷电刷接触,电刷通过导线连接到压敏电阻,从而使转子绕组产生的电流通过滑环,电刷和压敏电阻. 调节压敏电阻可以改变转子绕组电路的电阻,从而改变绕组电流,从而调节转子的速度.
c,轴. 轴嵌套在转子铁心的中间. 当三相交流电施加到定子绕组时会产生旋转磁场. 转子绕组通过旋转磁场旋转. 它通过转子铁心驱动旋转轴,从旋转轴传递动力.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/dianqi/article-157665-1.html
 格力空调通用的代码是什么
格力空调通用的代码是什么 你要重装系统就必须格式化C盘,程序与数据的方法
你要重装系统就必须格式化C盘,程序与数据的方法 哪个品牌的4k电视好?推荐索尼KD-65X8500G 4K液晶电视
哪个品牌的4k电视好?推荐索尼KD-65X8500G 4K液晶电视 冰箱保护罩的使用方法,特征和功能
冰箱保护罩的使用方法,特征和功能
重要的事说三遍