指纹识别的算法 对3D和vcesl产业做一个超详细的科普(3)
电脑杂谈 发布时间:2018-02-05 13:05:59 来源:网络整理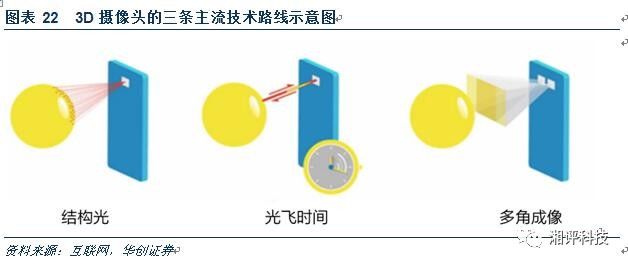
1、光飞时间(Time Of Flight)技术
TOF技术是通过主动发射调制过后的连续光脉冲信号至目标面上,然后利用传感器接收反射光,利用它们之间的相位差进行运算和转换得到距离/景深数据。
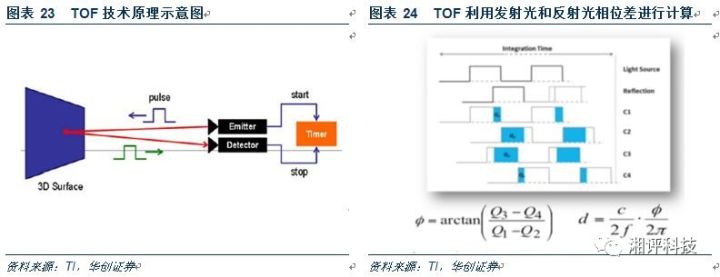
TOF优点在于可以做到对逐个像素点的深度进行计算,近距离情况下精度可以很高;缺点则在于室窄(远距离无法保证进度)以及成本较结构光要高。
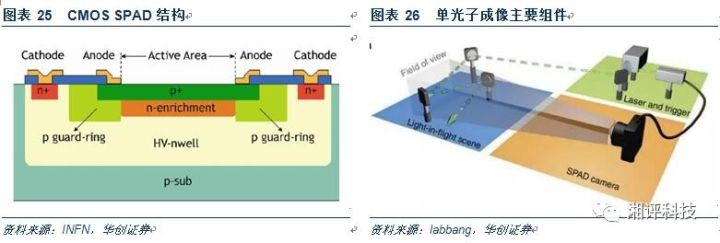
目前的主流技术TOF技术采用SPAD(single-photonavalanche diode,单光子雪崩二极管)阵列来精确检测并记录光子的时间和空间信息,继而通过三维重构算法进行场景的三维重构。SPAD是一类高灵敏度的半导体光电检测器,被广泛应用于弱光信号检测领域。
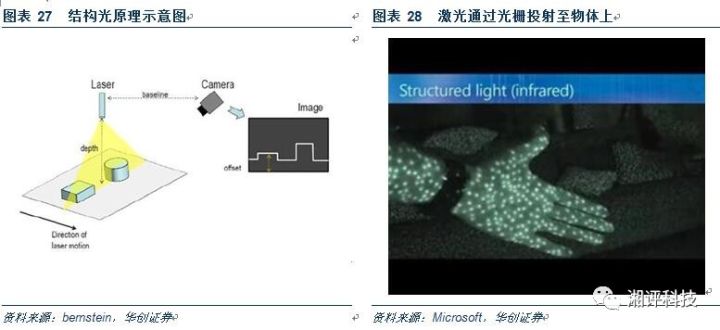
2、结构光(structure light)技术
结构光技术的基本原理是:在激光器外放置一个光栅,激光通过光栅进行投射成像时会发生折射,从而使得激光最终在物体表面上的落点产生位移。当物体距离激光投射器比较近的时候,折射而产生的位移就较小;当物体距离较远时,折射而产生的位移也就会相应的变大。这时使用一个来检测采集投射到物体表面上的图样,通过图样的位移变化,就能用算法计算出物体的位置和深度信息,进而复原整个三维空间。
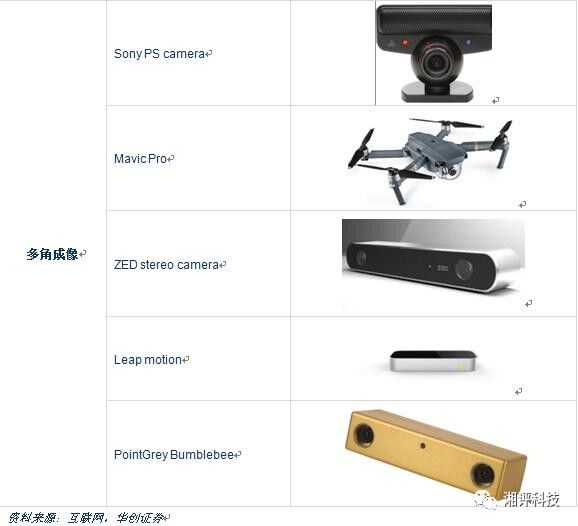
采用结构光技术的代表产品包括Kinect 1、Intel RealSense Camera(F200&R200)以及第一代project tango产品等等。
结构光技术优点在于一次成像即可读取深度信息,缺点在于解析度受光栅宽度与光源波长限制、对衍射光学器件(DOE)要求较高,也同样会受室外可见光红外线较大影响。
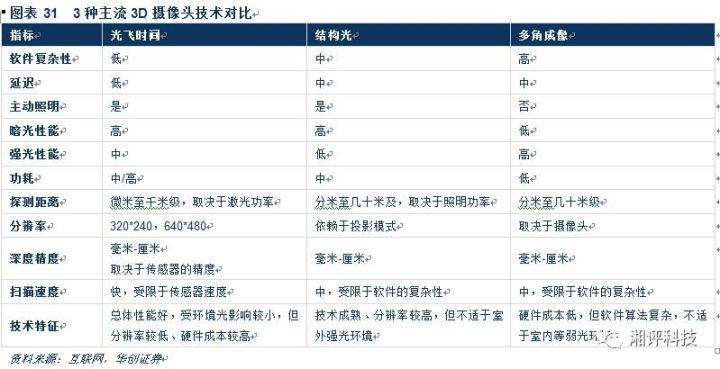
3、多角成像(Multi-Camera)技术
多角成像技术是基于视差原理,并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。
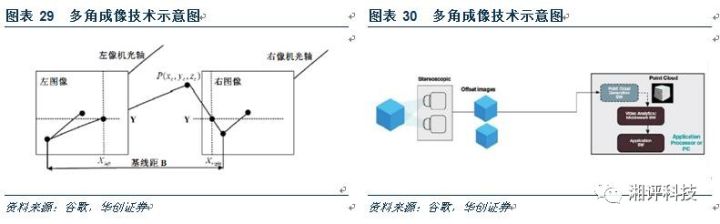
多角成像技术优点在于室内室外皆适用,不受日光影响以及几乎不受透明屏障影响,缺点则在于计算量巨大、算法复杂,对硬件具有较高要求。
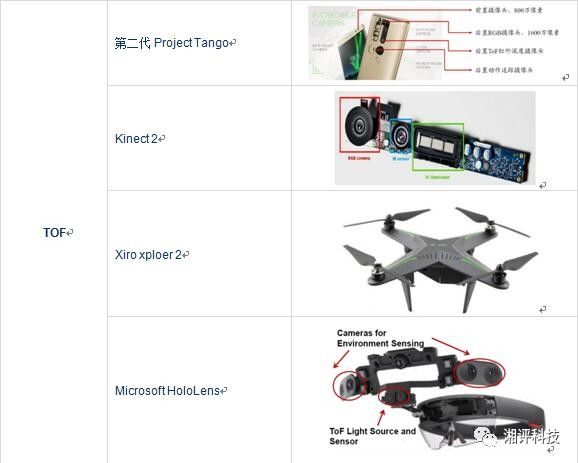
下表主要从软件复杂性、延迟、是否主动照明、探测距离、分辨率等指标对三种主流技术进行对比:
从目前已经上市的产品技术运用来看,结构光/TOF的应用具有成熟,且技术原理上殊途同归。初代产品大多采用结构光技术,而新一代产品采用TOF技术的数量则开始逐渐提升,我们认为TOF技术未来将凭借自身在软件复杂性、延迟、精度、扫描速度等领域的优势成为最具应用前景的3D技术;而结构光则在成本优势、一次性成像等方备较好优势,有望成为手机应用的排头兵。

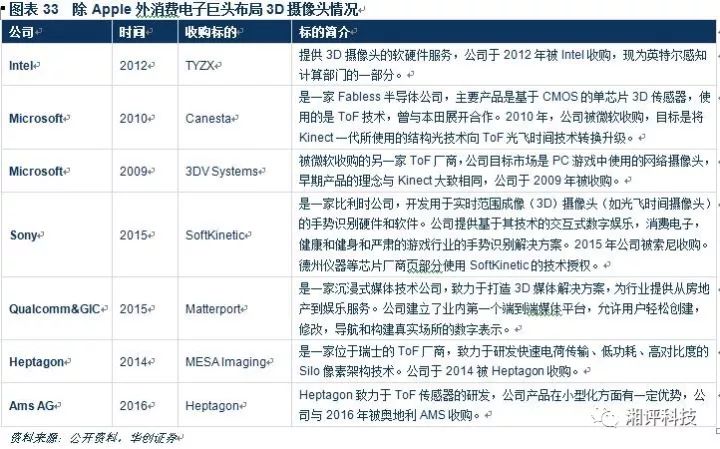
(二)国际消费电子大厂均已具备成熟3D Sensing技术苹果积淀最为深厚
自2009年以来,各大消费电子巨头纷纷开始布局3D领域,近两年里更是有加速迹象!以Intel、Microsoft、Sony以及高通为代表的巨头近年来在TOF 3D传感器、手势识别算法、下游应用软件解决方案等领域展开并购整合。
苹果在3D技术及其下游应用领域布局已久,我们预计iPhone十周年机型有望祭出这一杀手锏技术。纵观消费电子创新历史,大的终端客户具有培育新兴市场、引领创新趋势、带动行业技术革新的能力,一旦采用其他厂商高端厂商必定迅速跟进,整个产业有望迎来爆发式增长。
苹果最早于2010年在3D领域展开布局,目前已经收购多家3D成像、人脸识别及手势识别企业。在2010年9月收购瑞典算法公司Polar Rose,在2013年收购Prime Sense,在2015年收购机器学习与图像识别公司Perceptio和以色列3D技术公司LinX,以及动作捕捉公司Faceshift之后,苹果公司于2016年收购脸部识别系统公司Emotient。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-65175-3.html
-

-
张艳杰
我们现在处于民族复兴最好的时候最有希望的时候也是最关键的时候
-
 通过移动储值卡出售的固定无法报销~~
通过移动储值卡出售的固定无法报销~~ 具有两天假,五种保险和一千金基本工资的手机客户服务
具有两天假,五种保险和一千金基本工资的手机客户服务 移动宽带和电信宽带,两者的差距在哪里?说出来你都不敢相信
移动宽带和电信宽带,两者的差距在哪里?说出来你都不敢相信 雅虎冒天下之大不韪 扫描2亿邮箱向广告商出售数据
雅虎冒天下之大不韪 扫描2亿邮箱向广告商出售数据
慢慢慢