移动机器人原理与设计 深度解读角度传感器(2)
电脑杂谈 发布时间:2018-01-11 10:06:17 来源:网络整理3、通讯接口,微处理器通过通信接口接收来自应用系统的命令并将位移信息通过通信接口返回给应用系统。
硬件接口电路
数据处理单元由磁敏角度感应器、微处理器单元、通信接口以及输出模块,具体的功能框如图所示。
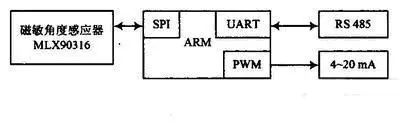
通过分析,磁敏角度感应器将拉线位移所导致的磁铁磁场转动的角度转换为磁敏角度。微处理器单元选用32位嵌入式ARM用于对接收到的磁敏角度数据进行处理,完成磁敏角度数据的接收,由于接收到的是磁场转换的角度,所以通过建立数学模型,结合轮毂的直径等因素,将磁敏角度换算为拉线的位移。
电容式角位移传感器

电容式角位移传感器用于测量固定部件(定子)与转动部件(转子)之间的旋转角度,因其具有结构简单,测量精度高,灵敏度高,适合动态测量等特点,而被广泛应用于工业自动控制。
一般来说,电容式角位移传感器由一组或若干组扇形固定极板和转动极板组成,为保证传感器的精度和灵敏度,同时避免因环境温度等因素的改变导致介电常数、极板形状等的间接变化,进而对传感器性能产生不利影响,对传感器的制作材料、加工工艺以及安装精度提出了较高要求,为了克服电容角位移传感器的局限性,科学工作者进行了长期的大量研究工作,其主要思想方法是将传感器设计成差动结构。

传感器系统原理框图如图所示:

由敏感元件、测量电路、智能部件与接口部件构成,敏感元件的结构所示如图1,测量部件由选择单元、激励源和电荷检测单元组成;智能部件由I/O单元、A/D单元、滤波单元、角度计算单元等组成;接口部件由电流输出单元、RS232通讯单元等组成。
敏感元件检测反映角度位置的电容值,是传感器的初始转换单元,测量单元采用了先进的抗杂散微小电容检测电路,将电容值转换为电信号,智能部件的主要功能是通过比例式算法计算出角位移量,最后由接口部件输出角度计算结果。
倾角传感器
倾角传感器经常用于系统的水平测量,从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器,倾角传感器还可以用来测量相对于水平面的倾角变化量。
倾角传感器基本原理
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。
随着MEMS 技术的发展,惯性传感器件在过去的几年中成为最成功,应用最广泛的微机电系统器件之一,而微加速度计就是惯性传感器件的杰出代表。移动机器人原理与设计作为最成熟的惯性传感器应用,现在的MEMS 加速度计有非常高的集成度,即传感系统与接口线路集成在一个芯片上。

倾角传感器把MCU,MEMS加速度计,模数转换电路,通讯单元全都集成在一块非常小的电路板上面。可以直接输出角度等倾斜数据,让人们更方便的使用它。
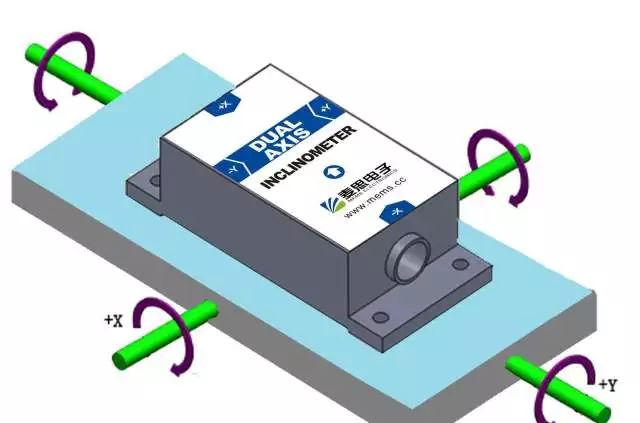
其特点是: 硅微机械传感器测量(MEMS)以水平面为参面的双轴倾角变化。输出角度以水准面为参考,基准面可被再次校准。数据方式输出,接口形式包括RS232、RS485和可定制等多种方式。抗外界电磁干扰能力强。
倾角传感器的分类
“固体摆”式惯性器件
固体摆在设计中广泛采用力平衡式伺服系统,其由摆锤、摆线、支架组成, 摆锤受重力G和摆拉力T的作用,如应变式倾角传感器就基于此原理。
“液体摆”式惯性器件

液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等。当壳体水平时,电极插入导电液的深度相同。如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI和RIII。若液体摆水平时,则RI=RIII。当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII 减少,即RI>RIII。反之,若倾斜方向相反,则RI<RIII。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-59763-2.html
 特变电工的“流行病” |新能源“双端”能源管理系统,收益可以增加28%!
特变电工的“流行病” |新能源“双端”能源管理系统,收益可以增加28%! 2020年,哪些创业项目在农村地区最赚钱?这些方面可以进行调查和理解
2020年,哪些创业项目在农村地区最赚钱?这些方面可以进行调查和理解 成熟的解决方案:VGA接口的详细解释和应用
成熟的解决方案:VGA接口的详细解释和应用 整套解决方案:如何拆分台式计算机的屏幕,教您如何连接台式机双显示器
整套解决方案:如何拆分台式计算机的屏幕,教您如何连接台式机双显示器
很多轻型航母