MEMS陀螺仪传感器教学计划. ppt
电脑杂谈 发布时间:2020-06-26 04:04:58 来源:网络整理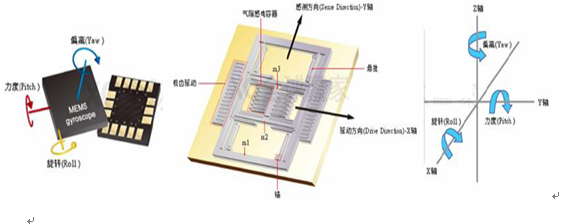
MEMS陀螺仪传感器07 1类测量和控制组2(11······20)Xu Panxi MEMS简介MEMS是微机电系统的缩写. MEMS是美国的名字. 在日本被称为微型机器,在欧洲被称为微型系统. 它是指生产的产品,它集成了微机构,微传感器,微执行器,信号处理和控制电路以及接口. ,通信和电源等于微型设备或系统. 微型传感器领域中较为成熟的MEMS传感器具有三种类型的加速度计,压力传感器和陀螺仪. 陀螺仪仪器最初用于导航和导航,但是随着科学技术的发展,它也已广泛用于航空和航天. 应用程序. 陀螺仪不仅可以用作指示器,而且更重要的是,可以用作自动控制系统中的敏感元件,即信号传感器. 根据需要,陀螺仪可以提供准确的信号,例如方位角,水平,位置,速度和加速度,以便飞行员或自动驾驶仪可以控制飞机,轮船或航天飞机按照一定的路线飞行,而导弹则在导航飞行器,例如卫星飞行器或太空探索火箭,这些信号直接用于完成导航物体的姿态控制和轨道控制. 陀螺仪的原理陀螺仪的原理是,在不受外力影响的情况下,旋转物体的旋转轴方向不会改变.

根据此原理,人们使用它来保持方向,他们将其称为陀螺仪. 陀螺仪的方向使其可以测量360度范围内的角度变化. 通过信号处理,我们可以获得物体的姿态信息. 这已经很早地应用于飞机姿态控制中! (视频1)现在广泛使用的MEMS陀螺仪(微机械)可用于航空航天,航空航天,导航,武器,汽车,生物医学,环境监测和其他领域. 与传统的陀螺仪相比,MEMS陀螺仪具有明显的优势: 1,体积小,重量轻. 它适用于对安装空间和重量有严格要求的场合,例如载荷测量. 2.成本低. 3.高可靠性. 内部没有旋转部件,全固态设备陀螺仪传感器 mems,抗大过载冲击,使用寿命长. 4.低功耗. 5.范围大. 适用于高速和大g值的场合. 6.易于数字化和智能化. 数字输出,温度补偿,零位校正等. 案例研究: MEMS陀螺仪在消费电子产品中的广泛应用MEMS陀螺仪是2010年流行的十大应用技术预测之一?三轴微机电系统(MEMS)陀螺仪将很快催生出更智能的智能手机,以及更好的游戏机操纵杆或. 现有的大多数MEMS陀螺仪用于稳定由数码相机和高端手机捕获的图像. 在2010年,这些组件还将安装在GPS和3D设备中,例如无线空中鼠标.

MEMS陀螺仪有望为手势识别和远程菜单控制界面带来创新,并取代传统的键盘和鼠标. MEMS陀螺仪提供的高精度运动信息使其迅速成为消费电子领域的新宠!在竞争激烈的游戏和3D远程控制市场中,对更加直观和动态的用户界面的需求正在增长. 当前的运动传感器技术由于在Nintendo Wii和Apple iPhone上的成功而得到普及,主要基于三轴加速度计,该加速度计提供了对倾斜,横向和线性运动的基本跟踪. 六轴运动处理方案通过陀螺仪添加三轴旋转信息,并结合通过加速度计获得的原始三轴线性运动数据,以提供高精度的三维运动跟踪,感测所有运动,包括识别态度. 例如,Wii的MotionPlus附件可以准确地跟踪游戏玩家的动作,甚至可以将腕部的轻微扭曲或身体的轻微旋转精确地复制到电视屏幕上. 您可以用一只手快速选择或滚动数字电视的菜单,例如轻拂,摇动,旋转,轻击等,以查找电视节目,电影,音乐和购物等,而无需按许多不同的按钮. 实际上,MEMS陀螺仪离我们很近. 她的一大亮点就是MEMS技术的大量应用. 然后,让我们看看iPHONE4带来的惊喜!手机上的加速度传感器,也称为G传感器,也称为G传感器. 顾名思义,其原理是在XYZ的三个方向上有三个加速度传感器. 可以通过测量由重力引起的三个加速度值的差来建立参考系统. 通过分析动态加速度,您可以分析设备在重力作用下的移动方式. 尽管加速度计可以为简单的定向和倾斜应用提供基本的运动感测,但它存在于更复杂的应用中,例如稳定光学成像(OIS). 一些限制会影响加速度计的操作和性能.

加速度计只能提供线性和向心加速度,重力和振动的总和. 只有添加陀螺仪才能捕获加速度线性运动信息元素. 在运动处理方案中,陀螺仪必须精确地测量角速度旋转运动. G传感器加速度计的局限性可以同时测量角度和位移,但在实际应用中经常会相互影响. 运动中倾斜角的测量将产生较大的误差. 而且它必须在与重力相反的方向上工作. 另绕相机机身两个平面的1.5°旋转大小范围. 补偿这种手抖的关键技术是能够使用陀螺仪测量细微的手抖.

一种典型的光学图像稳定功能,可移动诸如透镜,棱镜和图像传感器之类的光学组件,以感测和抵消检测到的振动,以补偿手抖动. 可以通过双轴陀螺仪和闭环控制系统(闭环控制系统)来感测手的运动,该系统由随附的执行器和位置传感器完成,以移动照相机中的光学组件. 陀螺仪是唯一可以提供应用所需的低噪声,高灵敏度和足够带宽的传感器. * *市场观察和发展报告称,MEMS市场在2007年增长了9%,达到60亿美元,其中前30名制造商的总收入为56亿美元,平均增长了7个百分点. 预计今年MEMS市场将增长11.1%,达到66.54亿美元. 目前,在汽车MEMS市场中,压力表和加速度计仍占很大的份额,但是随着对汽车安全性能的要求不断提高,尤其是在北美和欧洲,稳定性控制系统的安装率正在不断提高,陀螺仪市场增长速度明显快于前两个类别,预计到2011年将达到10%. 与使用角动量守恒原理的传统陀螺仪相比,MEMS陀螺仪使用的工作原理有所不同. 传统的陀螺仪是一个不停旋转的物体,其旋转轴的方向不会随携带它的支架旋转而改变. 显然,使用微机械技术处理这样一种可以在硅晶片基板上连续旋转的非支撑和旋转物体更加困难.
基于这个原因,MEMS陀螺仪利用科里奥利力来实现基于传统陀螺仪特性的设备的小型化. 什么是科里奥利?科里奥利力(Coriolis force)通常被称为科里奥利力和科里奥利力. 它是由于相对于旋转系统的线性运动的惯性而导致的旋转系统中粒子的线性运动的偏差. 这种描述来自物体运动的惯性. 由于地球的旋转作用在地球上的运动粒子上的偏转力就是这种代表. 地球自转的偏转力有助于解释某些地理现象,例如河边. 另一面则更加冲刺. 在北半球,从南向北流动的河流冲刷了东岸. 从北向南流动的河流冲刷了西岸. MEMS陀螺仪是科里奥利力最常见的应用. MEMS陀螺仪使用科里奥利力(旋转物体在径向运动期间承受的切向力),旋转陀螺仪可以反映各种形式的线性运动,并且可以通过记录陀螺仪组件接收到的科里奥利力来执行运动测量和控制. 为了产生该力,MEMS陀螺仪通常在两个方向上配备有可移动的电容板. “径向电容板加上振荡电压迫使物体径向移动. 水平电容板的测量是由于横向科里奥利运动带引起的. 电容发生了变化. ”这样,MEMS陀螺仪中的“陀螺对象”将在驱动下继续进行径向运动或振荡,从而模拟科里奥利力的运动在横向方向上来回不断变化. ,并且可以在横向方向上产生90°的驱动力差.
此科里奥利力类似于角速度,因此MEMS陀螺仪的角速度可以通过电容的变化来计算. 普通的MEMS陀螺仪由梳状结构的驱动部分,质量块,驱动方向,感测方向和电容板形状的感测部分组成. 以意法半导体的MEMS陀螺仪为例,其核心部件是微处理机械单元. ,设计为根据音叉机构进行操作(音叉机构的工作原理是,通过安装在音叉基座上的一对压电晶体使音叉以一定的共振频率振动. 音叉开关与被测介质接触,音叉的频率和幅度将发生变化,并且音叉开关的这些变化将由智能电路检测,处理并转换为开关信号. 电动机驱动部分使用静电驱动方法来回振动机械元件以产生共振. 科里奥利力用于将角速度转换为特定感应结构的位移. 两个运动粒子沿相反方向连续移动. 只要从外部施加角速率,就会出现力,该力的方向垂直于粒子的运动方向. 三轴陀螺仪MEMS的详细结构200um比例的显微照片所公开的MEMS陀螺仪均采用振动物体感应角速度的概念. 设计用于通过振动感应和检测科里奥利力的MEMS陀螺仪没有旋转部件,也没有轴承,并且已经证明可以使用微加工技术进行批量生产.
? 2010年6月24日,全球首款使用MEMS陀螺仪的手机正式发布. 视频2用于iphone 4的MEMS陀螺仪传感器立即引起iphone4的拥护者说,陀螺仪的引入将使运动感更强. 真实而准确的唾液战争的反对者坚持认为,传统的加速度传感器就足够了,而陀螺仪只是吸引眼球的工具. 为了区分是非,我们必须从加速度传感器和陀螺仪传感器之间的差异入手. 在介绍两者之间的区别和联系之前,让我们首先看一下Apple会议摘录的视频. 我们挚爱的乔布斯叔叔将向我们展示陀螺仪的实际应用. 三轴陀螺仪(角速度)新的动作功能库陀螺仪+加速度感应六轴感应重力旋转俯仰偏航围绕三轴旋转完美的游戏体验视频3为了满足最终用户的功能期望,有关三轴的信息必须使用旋转和三轴线性运动. 常见的误解是,要使手持系统具有运动处理功能,工程师必须选择添加陀螺仪或加速度计. 确实,行业分析师已经问过一个问题: “哪种产品将赢得运动传感器的竞争?”实际上,为了准确地描述线性和旋转运动,设计人员必须同时使用陀螺仪和加速度计. 单独使用陀螺仪的解决方案适用于需要高分辨率和快速响应的旋转检测. 使用加速度计的解决方案仅适用于固定重力参考坐标系,存性或倾斜运动,但旋转运动被限制在一定范围内. 但是陀螺仪传感器 mems,当同时处理线性运动和旋转运动时,必须同时使用陀螺仪和加速度计. 当跟踪倾斜和旋转运动时,加速度计可以在设备不移动时提供更准确的加速度测量,而MEMS陀螺仪可以在设备移动时提供更高的精度. *
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-258633-1.html
-

-
孙彤
么么哒哈哈
-
张亚静
在短短十个月内连阿里在美股票市场都能在一百二十美金跌破发行价
 生分证号码格式 长源电力:关于召开2018年第一次临时股东大会的通知(201
生分证号码格式 长源电力:关于召开2018年第一次临时股东大会的通知(201 TrueTruev.Com
TrueTruev.Com 手机导航卫星 知己知彼,百战百胜。公司销售的手机监控智能软件可以让您透彻了
手机导航卫星 知己知彼,百战百胜。公司销售的手机监控智能软件可以让您透彻了 入了北京移动的坑 含着泪也要用着
入了北京移动的坑 含着泪也要用着
大国之间的局势控制比你的嘴可难控制得多了