GPS差分定位是什么?差分GPS定位的原理
电脑杂谈 发布时间:2019-05-08 08:21:14 来源:网络整理
根据差分GPS基准站发送的信息方式可将差分GPS定位分为三类,即:
1.位置差分
2.伪距差分
3.相位差分
这3类差分方式的工作原理是相同的,即都是由基准站发送改正数,由用户站接收并对其测量结果进行改正,以获得精确的定位结果。所不同的是,发送改正数的具体内容不一样,其差分定位精度也不同。
位置差分原理
这是一种最简单的差分方法,任何一种GPS接收机均可改装和组成这种差分系统。
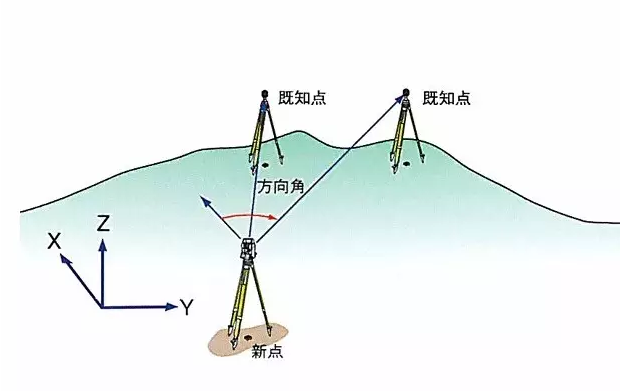
为提高定位精度,普遍采用差分gps(dgps)技术,建立基准站(差分台)进行gps观测,利用已知的基准站精确坐标,与观测值进行比较,从而得出一修正数,并对外发布。实习任务:完成外业观测并检查观测成果绘制计算草图,抄录控制点的已知数据,分别计算各导线边往、返测平距、闭合导线或附合导线方位角、坐标增量的闭合差的计算方法及概算。在测量过程中,不需要先通过测量工作在将要设立照像测绘仪测站的地面上建立知道坐标、高程的控制点,而可在符合建立测站条件的地面上直接安置好照像测绘仪,不进行对中操作,在整平后(整平即使照像测绘仪竖轴中心轴线与一铅垂线重合),用另一个已知道坐标或高程的测站上的经纬仪(如果是测量照像测绘仪测站坐标应并且知道该经纬仪照准部的方位角)观测该照像测绘仪的目标靶,读取以已知测站坐标点为原点的该照像测绘仪的目标靶的中心的方位角(即从已知测站到照像测绘仪的竖轴中心轴线的方位角,如果观测的是水平角,则用水平角来计算方位角。
最后得到的改正后的用户坐标已消去了基准站和用户站的共同误差,例如卫星轨道误差、SA影响、大气影响等,提高了定位精度。以上先决条件是基准站和用户站观测同一组卫星的情况。 位置差分法适用于用户与基准站间距离在100km以内的情况。

伪距差分原理
为了要免除充电线材的纠缠,无线充电技术在这一年发展的速度相当快,虽然目前三大联盟阵营(pma、wpc、a4wp)里的wpc受到最多厂商采用(qi无线充电标准技术),可说是最为风光,但无pma近日也正式宣布,已邀宏达电、华为、三星以及乐金等业者加入,一起打造无线充电技术标准的最大阵营。是一种实用新型的家用/商用防盗报警产品◆主机由微电脑cpu控制器等组成◆无线接收。近几年来无线数据传输技术己经成为小型工业监控系统的主要组成部分,此类无线数据传输和现存的有线数据传输以及其他无线数据传输相比较而言,工业监控中的无线数据传输主要使用射频(rf)技术来发送和接收数据包。
对于一台测距精度为1mm+2ppm的全站仪或者测距仪,当被测量距离为1公里时,仪器的测距精度为1mm+2ppm×1(公里)=3mm,也就是说,全站仪测距1公里,最大测距误差不大于3mm.。 如果为了更精准、更简单的测量距离的话,可以选择测距瞄准镜,这种瞄准镜不需要拿尺子测量,也不需要有参照物,基本上自动测距、无误差,尤其是面对移动的目标或者打猎,不好估计距离的时候最有效果,像一般打靶场或者固定射击的话,都会有参照物,或者事先测量等等。如果为了更精准、更简单的测量距离的话,可以选择测距瞄准镜,这种瞄准镜不需要拿尺子测量,也不需要有参照物,基本上自动测距、无误差,尤其是面对移动的目标或者打猎,不好估计距离的时候最有效果,像一般打靶场或者固定射击的话,都会有参照物,或者事先测量等等。

4.4rtk测量精度与基准站点位关系首先考虑基准站与测点的距离对rtk测量精度的影响,如5.2论述,只要满足点位距基准站距离在6km以内即可。为提高定位精度,普遍采用差分gps(dgps)技术,建立基准站(差分台)进行gps观测,利用已知的基准站精确坐标,与观测值进行比较,从而得出一修正数,并对外发布。1、基准重合原则,选择加工表面的设计基准为其定位基准,以便直接获得加工表面的设计要求(加工表面与设计基准间的距离、相互位置精度)、减少基准不重合带来的定位误差。
载波相位差分原理
全站仪电压 7.2v ,操作时间 / 标准功耗 9h / 30m处 / 50m处 7,mm x 10mm / 8mm x 20mmatr模式 /lock模式工作范围
1lambda)模糊度函数法综合法(aotf)载波相位实时动态差分技术rtk(realtimekinematic)gps技术实时差分动态(realtimekinematic-rtk)测量系统,是gps测量技术与数据传输技术相结合而构成的组合系统。龚健雅认为,越来越多的应用都需要在一个实时的gis系统下得到解决,我们需要把信息和数据实时披露,实时调度传感器,实现动态模拟,此时就需要采用先进的网络gis技术,在统一时空框架下,来管理与分析空天地的实时动态观测数据。主要有gps rtk技术-即实时动态载波相位差分技术和gps rtd技术-实时动态伪距差分技术。
差分GPS的出现,能实时给定载体的位置,精度为米级,满足了引航、水下测量等工程的要求。位置差分、伪距差分、伪距差分相位平滑等技术已成功地用于各种作业中。随之而来的是更加精密的测量技术----载波相位差分技术。
载波相位差分技术又称为RTK技术(real time kinematic),是建立在实时处理两个测站的载波相位基础上的。它能实时提供观测点的三维坐标,并达到厘米级的高精度。
采用精密单点定位时,首先要根据分布在全球的若干基准站的数据进行精密卫星轨道参数和卫星钟差的计算,再根据计算结果对单台接收机采集的非差相位数据进行处理,最终确定测站的精确坐标。其中rtk模式的工作原理,就是在已知高等级点上安置接收机为参考站,对卫星进行连续观测,并将其观测数据和测站信息,通过传输设备,实时地发送给流动站,流动站gps根据相对定位的原理,实时解算出流动站的三维坐标。为提高定位精度,普遍采用差分gps(dgps)技术,建立基准站(差分台)进行gps观测,利用已知的基准站精确坐标,与观测值进行比较,从而得出一修正数,并对外发布。
实现载波相位差分GPS的方法分为两类:修正法和差分法。前者与伪距差分相同,基准站将载波相位修正量发送给用户站,以改正其载波相位,然后求解坐标。差分gps原理后者将基准站采集的载波相位发送给 用户台进行求差解算坐标。前者为准RTK技术,后者为真正的RTK技术。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-97118-1.html
导致北洋舰队大东沟海战失利