GPS的定位原理解说
电脑杂谈 发布时间:2019-05-03 10:15:30 来源:网络整理
本节教材重点讲述了人造地球卫星的发射原理,推导了第一宇宙速度.应使学生确切地理解第一宇宙速度是卫星轨道半径等于地球半径时,即卫星在地面附近环绕地球做匀速圆周运动的速度.当轨道半径r大于地球半径时,卫星环绕地球做匀速圆周运动的速度小.由公式v=(gm/r)1/2可知,v∝r-1/2.清楚地了解这一点,才能比较卫星在不同轨道上运行时某一物理量的大小.。众所周知,中国真正发射美国制造的卫星是在1990年,而从1970年至今,中国已成功发射40多颗不同种类卫星,拥有研制科学实验卫星、返回式卫星、地球静止轨道通信卫星、气象卫星、资源卫星等设计和制造的成熟技术。1990年7月,中国长征二号丙首次发射,搭载了一颗巴基斯坦卫星,进行了双星发射,两颗卫星分别进入近地轨道和地球同步转移轨道。
gps定位系统的空间部分是由24颗gps工作卫星所组成,这些gps工作卫星共同组成了gps卫星星座,其中21颗为可用于导航的卫星,3颗为活动的备用卫星。是继美国第一个拥有全球卫星定位系统(gps),苏联第二个拥有全球导航卫星系统(glonass)后,中国成为世界上第三个拥有卫星导航系统的国家,美国gps系统历时16年,耗资120亿美元,由24颗卫星组网,而中国的北斗系统只由两颗卫星组成,在经济上更算,而且中国的北斗系统某些功能超过美国的gps,北斗系统它同时具备定位与通讯功能,不需要其他通讯系统支持。gps定位系统由三部分组成,即由gps卫星组成的空间星座部分、由若干地面站组成的地面监控系统、以接收机为主体的广大用户部分,三者有各自独立的功能和作用,但又是有机地配合而缺一不可的整体系统。
■ gsm-19t的另一项创新是,用户可以在办公室内把设计好的观测路线和点位输入给gps(可选),然后由gps指挥操作员在野外按设计进行观测。●gsm-19t的另一项创新是,用户可以在办公室内把设计好的观测路线和点位输入给gps(可选),然后由gps指挥操作员在野外按设计进行观测。● gsm-19t质子磁力仪的另一项创新是,用户可以在办公室内把设计好的观测路线和点位输入给gps(可选),然后由gps指挥操作员在野外按设计进行观测。
教学目标1.借助具体的测量活动,使学生感受1分米、1毫米的长度,掌握米、分米、厘米和毫米之间的换算关系。用gps同时测定三维坐标的方法将测绘定位技术从陆地和近海扩展到整个海洋和和在各行各业中的作用。主营卫星导航系统服务:公司是国内专门从事高精度 gnss(全球卫星导航系统)软硬件产品的研发、生产、销售,并提供基于高精度gnss系统工程解决方案及相关服务的龙头企业,已开发出测量型gnss、gis数据采集器、海洋探测设备、系统工程四大产品线十几个系列数十款产品,实现了从毫米级、厘米级、亚米级到米级等不同精度等级的覆盖,已掌握了卫星绝对定位等数十项核心技术。
国际GPS大地测量和地球动力学服务IGS自1992年起,已在全球建立了多个数据存储及处理中心和百余个常年观测的台站,我国也设立了上海余山、武汉、西安、拉萨、台湾等多个常年观测台站,这些台站的观测数据每天通过INTERNET网传向美国的数据存储中心,IGS还几乎实时地综合各数据处理中心的结果,并参与国际地球自转服务IERS的全球坐标参考系维护及地球自转参数的发布。使用者也可免费从INTERNET网上取得观测数据及精密星历等产品。
GPS系统的实时导航定位精度很高,美国在1992年起实行了所谓的SA政策,即降低广播星历中卫星位置的精度,降低星钟改正数的精度,对卫星基准频率加上高频的抖动(使伪距和相位的量测精度降低),后又实行了A-S政策,即将P码改变为Y码,即对精密伪距测量进一步限制,而美国军方和特许用户不受这些政策的影响,但美国为了获得更大的商业利益,这些政策终将被取消。

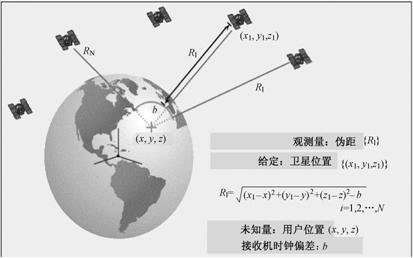
2.GPS定位原理
GPS接收机可接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及GPS系统信息,如卫星状况等。
载体上的 gps 接收机天线在跟踪 gps 卫星的过程中相对地球而运动,接收机用 gps 信号实时地测得运动载体的状态参数(瞬间三维位置和三维速度) gps 最初就是为军方提供精确定位而建立的,至今它仍然由美国军方控制。5.2gps的组成gps定位系统由gps卫星空间部分、地面控制部分和用户gps接收机三部分组成。自动跟踪是指根据地面站接收机所接收的卫星信标信号,检测出俯仰和方位误差信号,根据误差信号大小驱动天线转台系统,使天线自动对准卫星。

差,故称为伪距。对0A码测得的伪距称为UA码伪距,精度约为20米左右,对P码测得的伪距称为P码伪距,精度约为2米左右。
可以接收卫星(gps、glonas、北斗星)时间信号、国家授时中心bpl长波授时信号,或者接收外部irig-b码,并采用fpga完成先进的“时间驯服算法”,由高精度的卫星脉冲对本地守时脉冲进行驯服,从而实现高精度的守时功能。利用铱卫星增强gps还保证信号冗余,其使得能够使用载波相位接收机自主完好性监控(raim)进行故障检测。· 采用dmb-th技术(支持国标全模式)· 其中支持qpsk/16qam/64qam解调(采用解调芯片lgs-8g52-a1)· 支持mpeg-4 h.264/ mpeg-2 高清/标清信号(mp@hl/ml)解码· 全自动节目频道搜索· 支持pal/ntsc 4:3和16:9制式及576p/720p/1080i解析度· 256色多语言用户菜单· 图文及字幕功能(vbi和osd输出)· 电子节目指南(epg)· 节目频道管理· 支持杜比ac-3· hdmi(支持1080i/720p/576p)· 色差分量(ypbpr)及dvi端子输出(支持1080i/720p/576p mp@hl/ml)· cvbs及s-video输出端子· 可通过loop端子接驳另一台接收机· 可通过rs232接口进行软件升级,或者下载到U盘进行软件升级。
定位系统可以利用信号强度(ss)、载波相位(cp)、信号到达角度(aoa)和时间测量值(包括信号到达时间toa、信号到达时间差tdoa)以及它们的组合进行定位估算。当基频数据为1时,载波的振幅不变,相位也不改变.当基频数据为0时,载波的振幅还是不变,但相位改变180度.如果数据1和0交互传送,载波相位就会有180度的大转换,造成信号不连续。利用载波相位观测来定位,虽较虚拟距离观测精确,但由于观测载波相位会面临周波脱落及相位未定值等问题,因此应用在导航方面时,定位上会有较大的技术障碍,可靠度不高。

按定位方式,GPS定位分为单点定位和相对定位(差分定位)。gps定位原理单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量,大地测量或工程测量均应采用相位观测值进行相对定位。
在GPS观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响,在进行相对定位时大部分公共误差被抵消或削弱,因此定位精度将大大提高,双频接收机可以根据两个频率的观测量抵消大气中电离层误差的主要部分,在精度要求高,接收机间距离较远时(大气有明显差别),应选用双频接收机。
在定位观测时,若接收机相对于地球表面运动,则称为动态定位,如用于车船等概略导航定位的精度为30一100米的伪距单点定位,或用于城市车辆导航定位的米级精度的伪距差分定位,或用于测量放样等的厘米级 的相位差分定位(RTK),实时差分定位需要数据链将 两个或多个站的观测数据实时传输到一起计算。 在定位观测时,若接收机相对于地球表面静止,则称为静态定位,在进行控制网观测时,一般均采用这种 方式由几台接收机同时观测,它能最太限度地发挥GPS的定位精度,专用于 这种目的的接收机被称为大地型接 收机,是接收机中性能最好的一类。目前,GPS已经能 够达到地壳形变观测的精度要求,IGS的常年观测台站已经能构成毫米级的全球坐标框架
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-95922-1.html
-
 杜耒
杜耒 -
段鹏举
怎么想都觉得可怕
-
李志杰
弄僵后反而弊大于利
 坏消息!小米系列手机仅更新了三代,以后将不再可用
坏消息!小米系列手机仅更新了三代,以后将不再可用 关于景深与焦距,拍摄距离,光圈和疑问之间的关系
关于景深与焦距,拍摄距离,光圈和疑问之间的关系 对于初学者来说,如何购买合适的单反相机?
对于初学者来说,如何购买合适的单反相机? 随心所欲拍摄美好景色 广角数码相机推荐
随心所欲拍摄美好景色 广角数码相机推荐