gps导航的定位原理 物联网定位技术超全解析!定位正在从室外走向室内(4)
电脑杂谈 发布时间:2018-02-08 21:31:49 来源:网络整理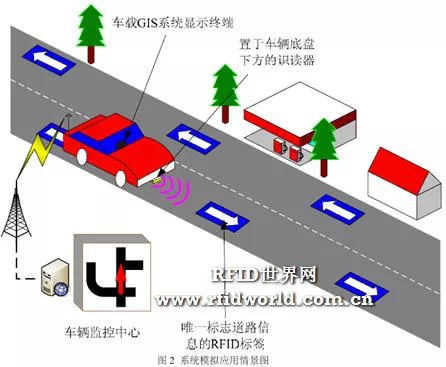
这种技术作用距离短,一般最长为几十米。但它可以在几毫秒内得到厘米级定位精度的信息,且传输范围很大,成本较低。同时由于其非接触和非视距等优点,可望成为优选的室内定位技术。
目前,射频识别研究的热点和难点在于理论传播模型的建立、用户的安全隐私和国际标准化等问题。优点是标识的体积比较小,造价比较低,但是作用距离近,不具有通信能力,而且不便于整合到其他系统之中,无法做到精准定位,布设读卡器和天线需要有大量的工程实践经验难度大。
3.红外技术
红外线是一种波长在波和可见光波之间的电磁波。红外定位主要有两种具体实现方法,一种是将定位对象附上一个会发射红外线的电子标签,通过室内安放的多个红外传感器测量信号源的距离或角度,从而计算出对象所在的位置。
这种方法在空旷的室内容易实现较高精度,可实现对红外辐射源的被动定位,但红外很容易被障碍物遮挡,传输距离也不长,因此需要大量密集部署传感器,造成较高的硬件和施工成本。此外红外易受热源、灯光等干扰,造成定位精度和准确度下降。
该技术目前主要用于军事上对飞行器、坦克、导弹等红外辐射源的被动定位,此外也用于室内自走机器人的位置定位。


另一种红外定位的方法是红外织网,即通过多对发射器和织成的红外线网覆盖待测空间,直接对运动目标进行定位。
这种方式的优势在于不需要定位对象携带任何终端或标签,隐蔽性强,常用于安防领域。劣势在于要实现精度较高的定位需要部署大量红外接收和发射器,成本非常高,因此只有高等级的安防才会采用此技术。
4.超声波技术
超声波定位目前大多数采用反射式测距法。系统由一个主测距器和若干个电子标签组成,主测距器可放置于移动机器人本体上,各个电子标签放置于室内空间的固定位置。
定位过程如下:先由上位机发送同频率的信号给各个电子标签,电子标签接收到后又反射传输给主测距器,从而可以确定各个电子标签到主测距器之间的距离,并得到定位坐标。
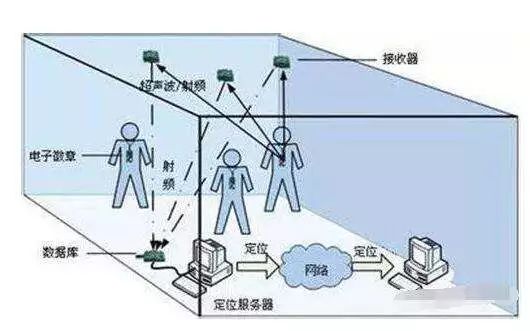
目前,比较流行的基于超声波室内定位的技术还有两种:一种为将超声波与射频技术结合进行定位。由于射频信号传输速率接近光速,远高于射频速率,那么可以利用射频信号先激活电子标签而后使其接收超声波信号,利用时间差的方法测距。这种技术成本低,功耗小,精度高。另一种为多超声波定位技术。该技术采用全局定位,可在移动机器人身上4个朝向安装4个超声波传感器,将待定位空间分区,由超声波传感器测距形成坐标,总体把握数据,抗干扰性强,精度高,而且可以解决机器人迷路问题。
超声波定位精度可达厘米级,精度比较高。缺陷是超声波在传输过程中衰减明显从而影响其定位有效范围。
5.蓝牙技术
蓝牙定位基于RSSI(Received Signal Strength Indication,信号场强指示)定位原理。根据定位端的不同,蓝牙定位方式分为网络侧定位和终端侧定位。
网络侧定位系统由终端(手机等带低功耗蓝牙的终端)、蓝牙beacon节点,蓝牙网关,无线局域网及后端数据服务器构成。其具体定位过程是:
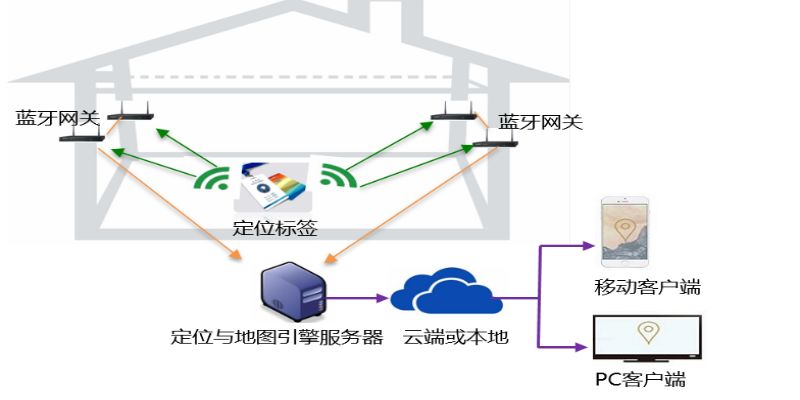
1)首先在区域内铺设beacon和蓝牙网关。
2)当终端进入beacon信号覆盖范围,终端就能感应到beacon的广播信号,然后测算出在某beacon下的RSSI值通过蓝牙网关经过wifi网络传送到后端数据服务器,通过服务器内置的定位算法测算出终端的具体位置。
终端侧定位系统由终端设备(如嵌入SDK软件包的手机)和beacon组成。其具体定位原理是:
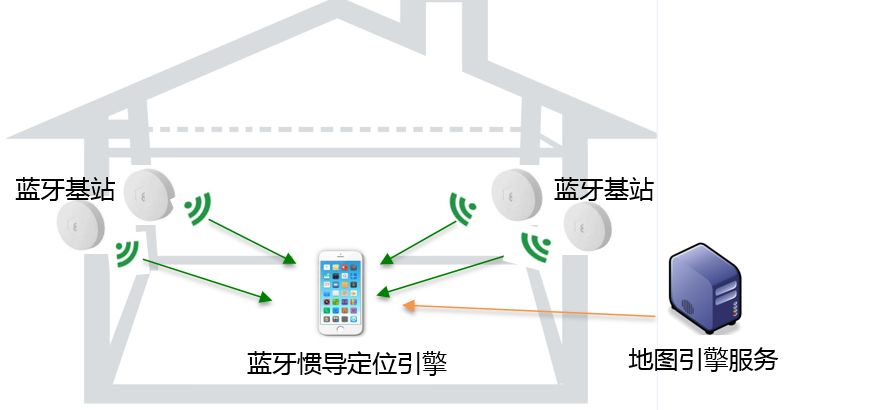
1)首先在区域内铺设蓝牙信标
2)beacon不断的向周围广播信号和数据包
3)当终端设备进入beacon信号覆盖的范围,测出其在不同基站下的RSSI值,然后再通过手机内置的定位算法测算出具体位置。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-67661-4.html
 尼康35 1.4G和28 1.8G在D600机身上各光圈的表现(娱乐测试贴)
尼康35 1.4G和28 1.8G在D600机身上各光圈的表现(娱乐测试贴) 4k对准检测工具下载1.75中文免费版
4k对准检测工具下载1.75中文免费版 陶瓷天线的原理是什么?
陶瓷天线的原理是什么?![[韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?](http://img1.cache.netease.com/catchpic/D/D0/D000A6FECE1D12FC25474DCFD969A13C.jpg) [韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?
[韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?
因此