gps导航的定位原理 物联网定位技术超全解析!定位正在从室外走向室内(3)
电脑杂谈 发布时间:2018-02-08 21:31:49 来源:网络整理成本和复杂度:成本和复杂度指标涵盖两个方面。一个是定位终端的成本,是不是可以用终端已有的硬件而不添加新的硬件。另一方面是布局和维护的成本及其复杂度,包括布局与维护定位所需要的设施和采集相关的。
功耗:定位所产生的功耗是一个很重要的指标尤其对使用电池的移动设备,如果功耗大很快使设备没电了,就限制了用户的使用。有调查表明,电池消耗过快是很多用户不开启定位功能的一个主要因素。所以,如果要实现随时随地的位置感知,必须降低定位所增加的设备额外功耗。
可扩展性:可扩展性指一个解觉方案扩展到更大的覆盖范围使用的能力,和方便地移植到不同的环境和应用的能力。
响应时间:系统给出一个位置更新所需的时间是响应时间,不同的应用需求不同,比如移动用户和导航应用需要快的位置更新。
蓬勃发展的室内定位技术
室内定位的技术分支多样,下图是各种室内定位方案的对比图:
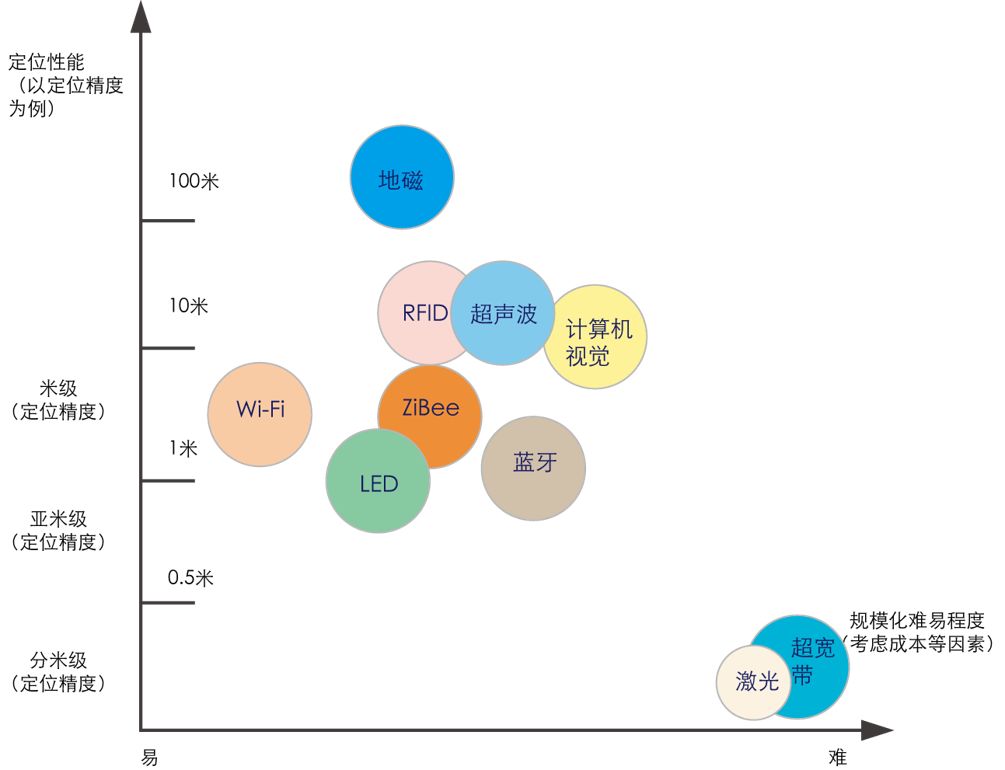
目前室内定位常用的定位方法,从原理上主要分为七种:邻近探测法、质心定位法、多边定位法、三角定位法、极点法、指纹定位法和航位推算法。
该方法虽然只能提供大概的定位信息,但其布设成本低、易于搭建,适合于一些对定位精度要求不高的应用,例如自动识别系统用于公司的员工签到。
数据稳定,无依赖,但该方法存在累积误差,定位精度随着时间增加而恶化。
不同的室内定位方法选择不同的观测量,通过不同的观测量提取算法所需要的信息。下表对主要的观测量进行简要的介绍。
该方法同样是测量信号到达时间,但使用到达时间差进行定位计算,可利用双曲线交点确定移动台位置,故可以避免对基站和移动台的精确同步。
该方法是指接收机通过天线阵列测出电磁波的入射角度,包括测量基站信号到移动台的角度或者移动台信号到达基站的角度。每种方式均会产生从基站到移动台的方向线。2个基站可以得到2条方向线,其交点即为移动台位置。因此,AOA方法只需要2个基站即可确定移动台位置。
获取方向和距离多用于航位推算定位,采用自包含传感器记录载体的物理信息,计算得到方向和距离,从而在已知上一位置的基础上计算得到当前的位置。
根据上面介绍的定位原理和观测量,衍生出了多种室内定位技术,下面将对主流的室内定位技术进行简要介绍。
1.WiFi定位技术
目前WiFi是相对成熟且应用较多的技术,这几年有不少公司投入到了这个领域。WiFi室内定位技术主要有两种。
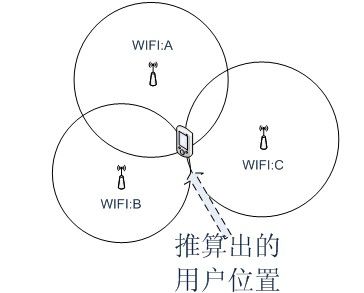
WiFi定位一般采用“近邻法”判断,即最靠近哪个热点或基站,即认为处在什么位置,如附近有多个信源,则可以通过交叉定位(三角定位),提高定位精度。
由于WiFi已普及,因此不需要再铺设专门的设备用于定位。用户在使用智能手机时开启过Wi-Fi、移动蜂窝网络,就可能成为数据源。该技术具有便于扩展、可自动更新数据、成本低的优势,因此最先实现了规模化。
不过,WiFi热点受到周围环境的影响会比较大,精度较低。为了做得准一点有公司就做了WiFi指纹采集,事先记录巨量的确定位置点的信号强度,通过用新加入的设备的信号强度对比拥有巨量数据的,来确定位置。
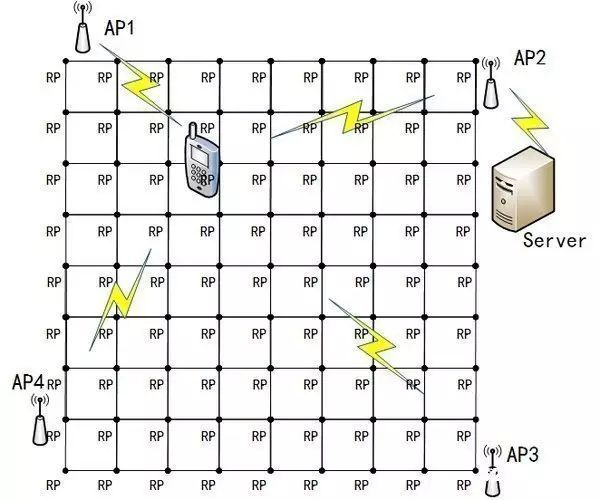
由于采集工作需要大量的人员来进行,并且要定期进行维护,技术难以扩展,很少有公司能把国内的这么多商场定期的更新指纹数据。
WiFi定位可以实现复杂的大范围定位,但精度只能达到2米左右,无法做到精准定位。因此适用于对人或者车的定位导航,可以于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。
2.FRID定位
RFID定位的基本原理是,通过一组固定的阅读器读取目标RFID标签的特征信息(如身份ID、接收信号强度等),同样可以采用近邻法、多边定位法、接收信号强度等方法确定标签所在位置。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-67661-3.html
-

-
赵佳佳
-
燕闵公
美国把伊拉克蹂躏了
-
秦庄公
只要我们保持定力假以时日一定能登上世界之巅
-
 尼康35 1.4G和28 1.8G在D600机身上各光圈的表现(娱乐测试贴)
尼康35 1.4G和28 1.8G在D600机身上各光圈的表现(娱乐测试贴) 4k对准检测工具下载1.75中文免费版
4k对准检测工具下载1.75中文免费版 陶瓷天线的原理是什么?
陶瓷天线的原理是什么?![[韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?](http://img1.cache.netease.com/catchpic/D/D0/D000A6FECE1D12FC25474DCFD969A13C.jpg) [韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?
[韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?
#杨洋icon##杨洋微微一笑很倾城##杨洋肖奈##杨洋轻奢young#看着你慢慢绽放~