GPS信号的工作原理分析-GNSS导航信号接收与发送第十二期
电脑杂谈 发布时间:2020-07-03 01:35:14 来源:网络整理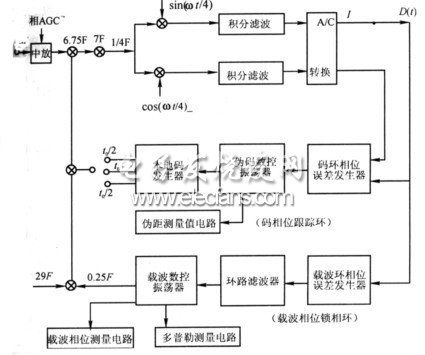
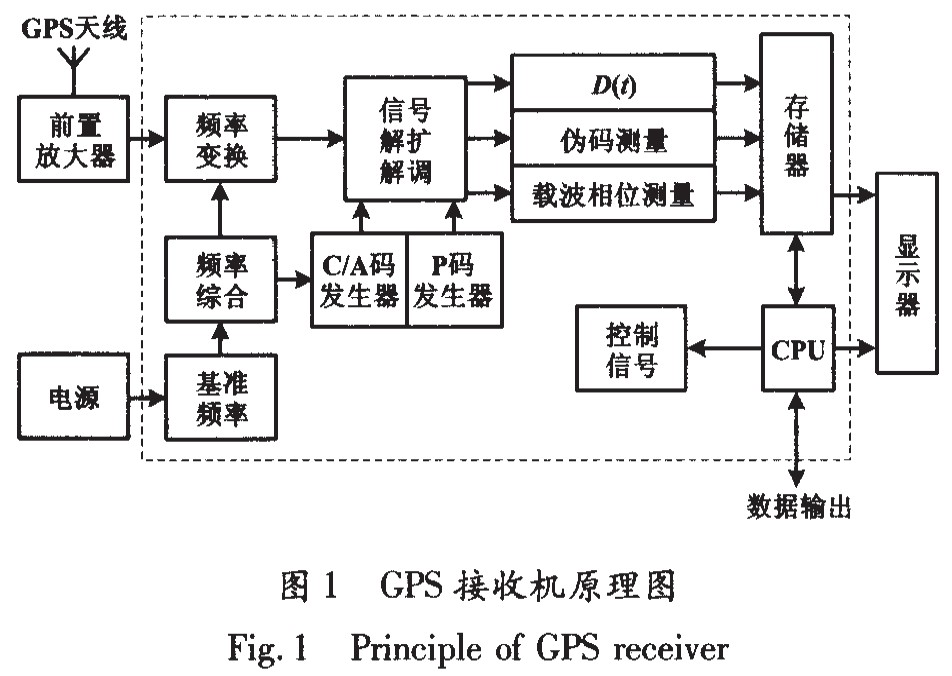
ControlAnalysis研究与讨论DCW 337数字通信世界2015.06简介在导航和定位测量中,GPS信号通常需要执行以下主要操作过程: 检查自身的性能,捕获和跟踪被测卫星并对其进行纠正时钟收集并记录导航和定位数据,连续选择合适的定位星座,并实时计算点坐标和行驶速度. 随着VLSI和固件技术的飞速发展,许多不仅可以自动按顺序完成这些操作gps接收机工作原理,而且还可以收集无人值守的GPS导航和定位数据,并将其发送到数据处理中心或导航数据处理器. 这些功能的自动化不仅取决于小型且稳定的超集成专用/通用芯片,还取决于具有十五六个功能的频道和导航软件. 通常使用两个微处理器作为导航和定位以及主控处理器. 例如,美国AOA公司生产的Turbo Rogue SNR-8000 GPS信号使用Motorola 88000微处理器作为主控制处理器. 它不仅控制基带处理器的操作,前端接口和时序参考,而且还提供用户所需的接口. 与外界沟通. 此外,主控处理器还实现以下数据处理功能: 导航定位初始化,数据采样,周期滑移修复,单点定位/定时解决方案,设置时标,数据编辑,数据压缩,测量点数据管理,远程数据传输的自诊断,控制和执行,如果配备了特定的硬件和软件,还可以重复执行某些特权任务.
可以看出,GPS信号的工作原理相当复杂,本文只能讨论要点. 捕获C / A码以识别GPS信号当使用由24颗卫星组成的GPS星座进行导航和定位测量时,对于特定用户,它可以同时接收4到12颗卫星发送的GPS信号,并且将有8到24颗卫星导航定位信号同时到达用户的全向接收天线. 因此,如何从这些具有相同载波频率的接收信号中检测所需的第一或第二GPS导航和定位信号是GPS信号必须解决的主要问题. 假设GPS信号具有4个并行跟踪通道,并且8颗卫星的GPS信号同时到达接收天线. 将它们混合,过滤并放置在中间后,如果信号在传播路径上暂时被忽略,并且接收机在内的附加延迟,则GPS卫星的导航定位信号到达用户接收天线所需的时间; idt(i = 2,3,4,...)GPS卫星的导航定位信号到达用户的接收天线所需的时间; adω,ad2ω卫星GPS信号的载波L1和L2的多普勒角频率;卫星GPS信号的载波L1和L2的多普勒角频率; P,G,D td)随时间变化相应的波形. 可以看出,对于第一个通道,如果需要跟踪和测量来自a星的GPS信号,则必须抑制并排斥其他卫星的GPS信号.

该方法基于以下事实: 不同的GPS卫星具有不同的伪噪声代码,并且通过捕获卫星作为伪噪声代码来实现GPS信号的识别. 从“全球导航卫星系统及其应用”一书的3.3中,我们可以看到P是一个长代码,带有2.351014符号. 即使将其截断为7天的截断P代码,符号总数也为(724360010230)10 = 6187104000000;如果以每秒50个符号(50b / s)的速度搜索P代码,则在一个周期内完成1432200天(3923.835616年)的时间才能完成截断的P代码的搜索,这是无法实现的. 因此,GPS信号全部使用总共1023个符号在1ms的时间上获取和跟踪C / A码. 如果以50b / s的速度搜索代码,则只有20.46s可以完成一个C / A代码循环. 搜索. 但是,C / C / A代码搜索间隔的第一步,即逐元素搜索,迫使C / A代码进入跟踪间隔. 在搜索状态下,有以下两个C / A码: 一个是从GPS卫星接收到的C / A码,称为接收码;另一个是接收方C / A代码生成的C / A代码,称为本地代码. 相应地,还有一个接收载体和一个本地载体. 通过对GPS信号工作原理的分析,第十二期GNSS导航信号的发送与接收刘继宇(武汉大学测绘学院,武汉430079)【摘要】GPS信号的操作关键是如何识别和锁定来自不同GPS卫星的导航和定位信号,并一一测量它们到接收天线的传播时间,然后计算从GPS信号到每个被测GPS卫星的距离. 这也是GNS信号接收. 本文对机器的基本特性进行了深入分析.
[关键词] GPS信号;伪噪声代码跟踪循环;载波跟踪环路工作原理分析GPS信号(第十二期)GNSS导航信号刘继宇(武汉大学学报,武汉430079)接收天线,然后计算距GPS信号的距离GPS卫星基本特性GNSS信号. 论文进行深度分析. 【关键词】GPS信号;伪噪声码跟踪循环;载波跟踪回路【中图分类号】TN96【文件识别码】A【商品号】1672-7274(2015)06-0327-03讨论和测量控制分析DIGITCW研究338 2015.06 DIGITCW GPS多普勒效应引起的卫星运行,接收到的载波频率会随着时间不断变化.
因此,搜索C / A码的目的是迫使本地代码与接收到的代码基本对齐,而且还迫使本地载波频率锁定接收到的载波频率,即在尺寸间隔中搜索C / A符号宽度τc,并且行间隔是中频滤波器的带宽BIf. 图2显示了C / A代码搜索和跟踪电路的框图. 代码以图1所示的方式进行搜索. 一个搜索单位接一个搜索单位(正方形),逐行,逐渐迫使本地代码和本地载波将接收到的代码和接收到的载波“对齐”,简而言之,就是“搜索”. 逐行,逐元素地导致本地代码进入跟踪间隔. 搜索从第一行的第一单元开始. 如果没有信号输入到搜索和跟踪控制电路,它将使本地代码移动一个符号,并且载波频率将暂时保持不变,并进入第二个搜索单元. 如果仍然没有信号输入,则搜索/跟踪控制电路迫使本地代码移动一个符号,载波频率保持不变,并进入第三个搜索单元. 遵循此逐元素搜索,直到第一行中的最后一个搜索单元;如果仍然没有信号输入,则搜索/跟踪控制电路不仅将本地代码移动一个符号,而且还将本地载波增加或减少频率BIf,从而将其移至第一个搜索单元. 第二行. 重复前一行的搜索步骤,逐行搜索,直到信号输入到搜索跟踪控制电路. 例如,直到第六行中的第七搜索单元才输入信号. 这意味着本地代码和本地载波已经基本“对齐”了接收到的代码和接收到的载波,因此搜索跟踪控制电路停止了符号移动以及本地代码和本地载波的载波频率增加和减少.
这时,代码电压控制时钟(VCO)和载波电压控制振荡器(VCO)变为受伪噪声代码跟踪环路和载波跟踪环路(Costas循环). 第二步,微调,双跟踪循环解释上述D代码搜索,只能解决本地代码和本地载波基本上分别与接收到的代码和接收到的载波对齐的问题. 换句话说,它只能解决GPS信号的“冷启动”问题. 两者的精确对齐取决于以下伪噪声代码跟踪环路和载波跟踪环路(Costas环路);这两个也是相关通道的主要组成部分. 2.1伪噪声代码跟踪循环图3是伪噪声代码跟踪循环的框图. 图中的环路滤波器和压控时钟形成一个反馈环路. 后者自动调整本地代码的作用,从而导致本地代码跟踪并同步到接收代码. 例如,当接收到C / A码时,数据码的速率非常低,并且载波频率远高于C / A码的码速率. 为了简化讨论,我们将不考虑两者的影响,仅讨论C / A代码. 输出;接收到的代码G(t)被发送到乘法M-τ);因此,相关系数为: 时间t的离散采样相关系数为: 当本地码和接收码未“对齐”时,当本地码和接收码为1时,经过后减去结果低通滤波器获得误差电压V(t),以调整压控时钟. 如果时钟信号的相位滞后,则将施加误差电压V(τ). 当时钟加速时,由时钟信号控制的本地代码将相应加速,直到本地代码“对齐”接收到的代码;如果时钟信号的相位超前,则误差电压V(τ)会迫使时钟变慢,并且由时钟信号控制的本地代码会变慢,直到本地代码和接收到的代码同步.

这时gps接收机工作原理,本地代码输出的本地代码G'(t)等于接收到的代码G(t);乘数Mφ),因为G'(t)和G(t)已经“对齐”,所以G(t)G'(t)= 1. 因此,乘数M通过低通过滤波器是一种较干净的数据代码,是一个中频载波,即解扩信号的伪噪声跟踪环路的框图,到目前为止,伪噪声代码跟踪环路已达到跟踪伪噪声代码. ,跟踪精度可以达到符号宽度的十分之一甚至更高载波跟踪环路框图2.2载波跟踪环路图4是载波跟踪环路(也称为costas环路)的框图. 噪声码跟踪环路和正交乘法器M t(为便于讨论,假定其幅度为1);它也分别发送给M,但振荡信号发送给正交乘法器,这是一个相移等于90,因此达到M的输出信号是: 在上述两个信号通过它们的re对于低通滤波器而言,由于后者对中频载波的滤波作用,它们成为上面的两个信号. 同时,它被发送到微分乘法器Md,后者的输出的误差ControlAnalysis研究和讨论DCW 339数字通信世界2015.06因为数据代码D(t)是值为1的二进制脉冲串,并且其速率为每秒对于50位(即一个符号持续20毫秒),D(t)的自乘必须等于1. 误差电压ud通过环路滤波器和环路乘法器发送到压控振荡器Mp波和补偿功能可调节后者的振荡频率.
当压控振荡器的振荡频率锁定在中频GPS信号的中心频率时,φ= 0. 这称为载波跟踪环路的锁相,达到了跟踪载波的目的. 仅在这种情况下,同相乘法器M通过低通滤波器输出的信号是纯数据代码D(t),然后解释GPS卫星发送的导航消息. 上面的解释过程也可以总结在图5中. 巧妙地使用Z计数来捕获和跟踪P. 如上所述,即使拦截P代码仍然具有6.18710 12个符号. 它不能通过逐元素搜索方法捕获,而是根据C / A代码进行解释. 外发导航消息中的Z计数实现对P代码的捕获和跟踪. 所谓的Z计数(Z-count)是从一周开始算起的1.5秒;本周和周末的波浪均来自同一振荡器,稳定度为110-13. 因此,Z计数是子代码X1的时间段数. 它们的关系如图6所示. 从图中可以看出,只要知道Z计数,就可以确定任意一个P代码子代码X1中的时间,并且可以激发本地P代码来生成P代码搜索完成时对应的P. 如《全球导航卫星系统及其应用》第2.5节所示,导航消息每个子帧的第二个字是转换码(HOW,越区切换字),其第1到第17位表示所需的Z计数,即P代码子代码X1时间段(1.5s)的重复次数.
每个子帧的周期为6s,即有4个计数. 在每个子帧周期(6s)之后,转换代码(HOW)在下一个6s子帧的开头给出元素的Z计数,因此可以将该代码强制进入子帧开头的跟踪间隔,然后接收到的P代码和本地P代码的相关输出达到最大值,并且两个P代码被“对齐”以达到捕获和跟踪P代码的目的. 近年来,美国军方已经成功研究了直接捕获P(Y)的SAASM技术. 该技术是“选择性可用性防欺骗模块”的缩写,称为“选择性可用性防欺骗模块”. 这是GPS信号的一种新设计,用于直接捕获P(Y)码. SAASM技术的关键在于GPS信号具有大量相关通道和相关间隔,并且可以使用较低的精度(通常比当前要求宽10,000倍)来执行并行信号处理和符号相关性该计算导致本机生成的P代码与间接捕获P代码之间的差异,如图7所示. SAASM直接捕获P(Y)GPS信号连接结论综上所述,该功能的关键在于GPS信号是一种方法,用于识别和锁定来自不同GPS卫星的导航定位信号,并逐个测量它们向接收天线的传播时间. 对于动态用户使用的代码,通过搜索,捕获和跟踪仅用1023个符号的C / A代码来识别来自不同卫星的GPS信号.
即使在搜索过程中,每个GPS卫星提供的“历书”数据也可以大大缩短,并加快了C / A码的获取. 因此,许多制造商将GPS卫星历书数据存储在GPS信号中,以便将其用于导航和定位测量,这被称为“热启动”. 相反,如果没有存储GPS卫星历书数据,则称为“冷启动”. . 实际上,只要GPS信号已经进行了导航定位测量,它通常就会存储年历数据. 随后的启动操作都是“热启动”. 启动操作之间的时间间隔越短,启动(捕获C / A越快,这对于动态用户而言非常有益. 参考文献[1]刘继宇. 全球导航卫星系统及其应用. 北京: 测绘出版社,2015. [2] We11s,DE等人,GPS定位指南,加拿大新不伦瑞克大学,1987,[3] Von Dierendonck,AJ,《了解GPS术语: 指南》,GPSWorld,1995年1月. P.34〜44作者简介简介: 刘继玉,武汉大学测绘学院现任教授/博士生导师,纽约中国科学院)外国研究员,中国电子学会会员.
主要研究方向是GNSS卫星导航和定位/卫星激光测距技术. 在30余种中英文学术期刊上发表了280余篇相关研究论文. 他是2013年唯一的作者(北京)科学出版社. 《 GPS卫星导航和定位的原理和方法》一月出版. 其主要成果已发表在2001年美国出版的《谁的世界》,2005年在美国出版的《谁的工程》和2007年中国科学技术协会出版的50余本词典中. 作为“中国科学技术专家传记”工程技术版“电子信息科学与技术第二卷”.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-266418-1.html
-

-
孙萌萌
因此广得民心
 深圳键鼠制造商,公司,企业
深圳键鼠制造商,公司,企业 一起来搞机 篇十六:九个月后再评最具性价比的红米旗舰—停产的白色版小米6
一起来搞机 篇十六:九个月后再评最具性价比的红米旗舰—停产的白色版小米6 要解决收费过高和售后服务方面的投诉问题,您必须求助于海尔美格力和其他制造商!
要解决收费过高和售后服务方面的投诉问题,您必须求助于海尔美格力和其他制造商! 最新版本的饥饿龙
最新版本的饥饿龙
1