GNSS调查原理和应用(审查)
电脑杂谈 发布时间:2020-05-20 11:23:42 来源:网络整理
这是我第一次写博客. 如果您有任何问题,请告诉我.
我目前正在北京大学(北京)学习测绘工程的本科学位. 该博客用于复习本课程的知识,希望对有需要的朋友有所帮助. 欢迎大家交流学习!
本课程教科书使用了徐少全的《 GPS测量的原理和应用,第三版》. 辅助教科书“ GPS测量和数据处理”,李正航,黄劲松.
仅在此处查看课程内容.
在1950年代末,人造卫星的出现遵循了卫星大地测量方法. 经络卫星导航系统(NNSS).
1960年代很长的基线干涉法(VLBI)
范围可达数千公里,测距精度为米,分米,厘米,毫米,天线直径数十厘米至几千米.
在1970年代,卫星多普勒技术,海洋卫星测高仪(SA)技术以及激光到卫星测距(SLR)技术.
该系统由卫星网络,监测站和组成. 卫星网络总共有六个子午卫星,它们位于六个轨道平面上,并且都穿过地球的南北两极. 定位精度: 单点定位数十米,联合测量位置0.5〜1M. 可以全天观察,然后进行处理.
NNSS局限性:
卫星数量很少,无法实时定位. 轨道低,难以准确确定轨道,因此导航定位精度低. 低频使得难以补偿电离层效应.
1980年代,全球定位系统(GPS)
到目前为止,GNSS.
空间大地测量技术将经典的大地测量学带入了空间大地测量学的新时代.
1)测量精度和作用范围得到了大大提高
2)丰富了大地测量学的内容,并显示了新的发展方向
3)加强与地球物理学,地质学和天文学的联系
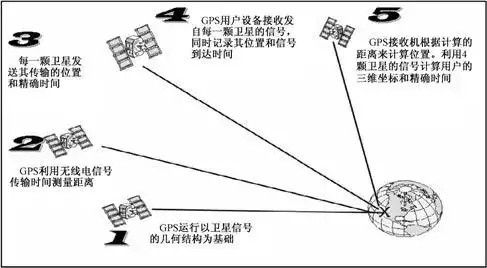
GPS系统由三部分组成: GPS卫星星座(空间部分),地面监视系统(地面控制部分)和GPS信号(用户设备部分).
1. GPS卫星星座(空间部分)
GPS卫星组成
轨道上有21颗工作卫星和3颗备用卫星,轨道平面分布6个,轨道倾角约55°,平均高度约20200 km(20,200 km),卫星运行时间为11小时58分钟. 随时随地都可以观察到至少4颗卫星.
基本GPS卫星功能
(1)接收并存储地面监测站发送的导航信息,接收并执行监测站的控制指令;
(2)通过星载高精度铯钟和rub钟提供精确的时间标准;
(3)立即向用户发送位置信息;
(4)在地面监测站的指示下,调整卫星的姿态并通过推进器启动备用卫星;
(5)卫星上有一个微处理器,可以执行一些必要的数据处理工作.
2. GPS地面监控系统(地面控制部分)
地面控制部分的组成
1个主控制站,3个注入站和5个监视站. 分布如图所示.

主站的主要任务
根据地面监测站和本站的跟踪和观测数据,计算每颗卫星的轨道参数,时钟参数和大气校正参数,时钟参数和大气校正参数,汇编导航消息并将其发送到注入站该站还负责调整离轨卫星,并在必要时启用备用卫星.
协调和管理所有地面监测系统的工作,并为全球定位系统提供时间参考.
监控站的主要任务
主要任务是在主控制站的控制下自动跟踪和收集各种数据. 它由双频,高精度原子钟,计算机和几个环境传感器组成. 它的工作过程: 不断观察GPS卫星,收集数据并监视卫星的工作状态. 所有观测数据都由计算机处理,然后存储并传输到主控制站,以确定卫星的轨道.
注射站的主要任务
在主控站的控制下,由主控站计算并编译的卫星星历表,时钟差,导航消息和其他控制指令被注入到相应卫星的存储系统中,并且注入的精度信息受到监视.
3. GPS信号(用户设备部分)
省略
目前,有24颗卫星正常运行,轨道平面之间的角度为120°,轨道倾角为64.8°,轨道偏心度为0.01,每个轨道上等距分布8颗卫星,卫星为19100 km在地面之上.
在高纬度地区,精度要优于GPS.
30个轨道,均匀分布在3个轨道表面上,每个轨道表面工作9个,备用1个,轨道倾角为56°,轨道高度为23616 km,运行时间为14小时4分钟.
北斗功能
(1)具有生成位置报告和短信的功能,以便用户之间可以进行通信.
(2)一次包含多个轨道设计.
GEO(静地轨道): 在赤道平面上36,000公里,与地球同步旋转
IGSO(倾斜地球同步轨道): 与GEO的高度相同,但轨道和赤道的倾斜角约为55°
MEO(中地球轨道): 在大约22,000公里的高度绕地球轨道运行
(3)使用三频信号.
(4)改善了原子钟的稳定性.
(5)在卫星间链路的支持下,卫星轨道确定的准确性得到了显着提高.

•大坝变形监测

•监测地壳运动
•平板运动监控
•人员定位: 例如运动员定位
•精准农业
•控制调查和工程调查
描述卫星位置
天体坐标系的定义:
天体坐标系的原点O在地球中心,Z轴与地球的旋转轴重合,X轴指向春分点,Y轴是右手系,也就是说,当拇指以外的右手的四个手指从X轴到Y轴按住时,拇指点与Z轴重合.
天轴: 地球自转轴的延长线.
网球(NS): 天轴与天球的交点.
天球的子午线: 包含天轴,并穿过天球上的任何平面.
天空天体平面: 穿过地球质心并垂直于天空轴的平面.
黄道带: 地球公转的轨道表面与天体相交的大圆圈. 也可以说,当地球自转时,地球上的观察者可以看到太阳在天球上的轨道.
Equinox: 当太阳在黄道上移动时,从天球的南半球到北半球是黄道和赤道平面的交点.

天体坐标系不随地球旋转而移动.
天体坐标系的表达:
天球坐标系(右上角α,偏角δ,径向半径r)和天空间直角坐标系(X,Y,Z).
两者之间的转换关系如图所示

太阳和月亮在地球上的引力产生了一个力矩,这导致地球自转轴的方向在天球上缓慢移动.
岁差
地球自转轴相对于天体坐标系的自转并非固定在空间中,而是以25800年(长期)的周期自转. 这种运动称为进动.
章节
短期变化的最大幅度约为9英寸,周期为18.6年. 这些短期变化称为章动.
在进动的影响下,地球的自转轴在北黄极周围的空间中旋转(从北天极上方顺时针观察),导致北天极在北半球的天球上缓慢旋转黄杆也一样.
瞬时极点: 随时间变化的极点称为瞬时极点(考虑进动和章动).
瞬时北天极: 观察瞬时北天极. (瞬时真天极)(考虑岁差和章动)
瞬时平坦的北天极: 围绕北部极均匀运动的北极天体通常称为瞬时平坦的北天极,称为平坦的北部天极(瞬态平坦的天极). (仅考虑进动)
瞬时真实天球坐标系—>瞬时天球坐标系—>标准天球坐标系
第一步通过章动进行校正,第二步通过岁差进行校正. (从短到长)
比较图片

从平面天体坐标系到瞬时天体坐标系的过程是相反的.
描述地球上点的位置.
地球坐标系定义:
大地坐标系的原点O在地球中心,Z轴与地球的旋转轴重合,X轴指向格林威治子午面与赤道面的交点,Y轴是右手系统.

地球坐标系随地球旋转而运动.
地球坐标系的表达:
地球坐标(纬度B,经度L,地球高度H),直角坐标(X,Y,Z).
将大地坐标计算为空间直角坐标

将空间直角坐标转换为大地坐标

在公式中,N = a /(1-e2sin2B)1 / 2N = a /(1-e ^ 2sin ^ 2B)^ {1/2} N = a /(1-e2sin2B)1/2, NNN是此时unit圆的曲率半径,e2 =(a2-b2)/ a2e ^ 2 =(a ^ 2-b ^ 2)/ a ^ 2e2 =(a2-b2)/ a2,eee为第一椭圆形偏心率. 应该注意的是,在反向计算过程中有必要迭代找到BBB.
在同一坐标系中,地球的直角坐标(X,Y,Z)和地球的坐标(B,L,H)之间有两个不同的坐标表达式,它们之间存在唯一的数学转换“关系.
极移
地球自转轴相对于地球坐标系的旋转,地球极在地球表面的位置随时间变化.
几个名词
BIH: 国际时局
IERS: 国际地球自转服务组织
ITRS: 是指国际地球参考系统. 每年,都要对全球所有站点的观测数据进行综合处理,以获得协议地球参考系统ITRS.
ITRF(国际陆地参考框架): 指构成ITRS的地面控制点网络,意为“框架”.
IGS: 国际GPS地球动力学服务. 几乎所有IGS精密星历都在ITRF框架下提供.
几个协议地球坐标系

常规坐标系

协议天体坐标系和地球坐标系之间的转换步骤:
协议天体坐标系->瞬时天体坐标系->瞬时地球坐标系->协议地球坐标系
参考椭球的四个基本参数: 长半轴a,扁度f,重力常数GM,地球旋转角速度ω.
几个卫星导航坐标系之间的关系






ITRF97框架,时代2000.0.
3个平移参数,3个旋转参数和1个比例参数. 如果参数未知,则可以通过间接调整使用两个坐标系中至少三个重合点的坐标来获取转换后的七个参数.


ITRS国际地球参考系统ITRS是目前世界上最准确,最稳定的全球地心坐标系. 国际地球参考系ITRF是一个地心四维坐标参考系,是ITRS的具体实现. ITRF由IERS(国际地球自转和参考系统组织)发布. 迄今为止,IERS已发布了总共13个参考框架. 最新的参考框架是ITRF2014.
两个ITRF框架之间的转换方法:
首先是帧之前的时期,即同一帧下不同时期之间的转换,然后是不同帧之间的转换.
第二,帧之后是历元,即先执行不同帧之间的转换gps测量工作原理,然后再执行同一帧下不同历元之间的转换.
转换所需的14个参数可以在IGS官方网站上找到.
同一帧中不同纪元之间的转换使用以下公式.

平面坐标转换需要两个平移参数,一个旋转参数和一个比例参数. 这些参数至少可以通过两个公共点来求解.
该点的高程为正高度(也称为海拔高度),法线高度和地球高度. 还有相对海拔.
真高: 从地面沿垂直线到大地水准面的距离.
正常高度: 从地面沿垂直线到大地水准面的距离.
地球高度: 沿法线从地面到椭球的距离.
相对较高: 沿垂直线从地面到任何水平面的距离.
高程异常: 地球高度与正常高度之间的差异,即椭球与大地水准面之间的差异.
大地水准面间隙: 大地水准面高度与正向高度之差,即椭球与大地水准面之差.
关系如图所示.

•1.恒星时间: 以春分点为参考点的时间系统. (本地)
•2.平坦的太阳时间: 以平坦的太阳为参考点的时间系统. (本地)
•3.世界标准时间: 格林威治标准时间是午夜为零的太阳时间.
•4.原子时间: 基于物质中原子运动的周期.
•5.协调世界时: 以原子秒(跳秒)为单位的世界时间.
•6.GPS时间系统: 当秒的长度是一个原子时,时间的起点是1980.1.6.UTC 0,开始后不跳过时间,并且该时间是连续的.
原子时间= GPS时间+ 19秒
GPS周
GPST开始时间: 1980年1月6日0: 00,GSPT周0,0秒
一周: 604800s = 3600s×24×7
GPS周号: 1268 6 554715
轨道: 太空中卫星的轨迹
轨道的作用: GPS卫星导航和定位的基础,精确的轨道信息是扩展GPS应用的前提.
当卫星在太空中绕地球旋转时,它不仅受到地球引力场的引力的影响,还受到太阳,月亮和其他天体的引力以及太阳光压的影响,大气阻力和地球潮汐力. 卫星的实际轨道非常复杂,很难用简单而准确的数学模型对其进行描述.
在各种力对卫星轨道的影响中,地球引力场的影响占主导地位,其他力的影响则相对较小. 如果假定地球重力场的影响为1,则其他重力场的影响小于10-5.
正常轨道: 仅考虑地球和卫星之间的力. 没有考虑其他天体和大气物理现象的影响. 也就是说,只考虑中心力(不考虑扰动力).
摄动轨道: 受其他天体干扰和大气物理现象影响的正常轨道. 同时考虑非中心力(光动力)和中心力.
确定捕获的轨道: 首先通过研究非摄像机运动来确定非摄像机轨道,然后研究各种微扰力对卫星运动的影响,然后修改卫星的非摄像机轨道来确定卫星的感知运动轨道瞬时特性.
第一个定律是“轨道定律”: 所有行星都以不同的椭圆轨道绕太阳运动,而太阳处于这些椭圆的焦点.
第二定律是``面积定律'': 对于每个行星,在任何相等的时间内被连接行星和太阳的线所扫过的面积相等(``面积速度''不变).
第三定律是“周期定律”: 所有行星的椭圆轨道的长半轴的三次方功率与旋转周期二次方功率之比相等.


真实近点角的求解: 计算近点角,从近点角迭代求解近点角,然后从近点角求解真实近点角.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-216476-1.html
-

-
徐树朋
小男神太棒了爱你
 大众捷达导航专用车载DVD导航一体老款捷达机前卫伙伴导航
大众捷达导航专用车载DVD导航一体老款捷达机前卫伙伴导航 马航搜索 每日经济新闻
马航搜索 每日经济新闻 太阳能信号灯充电系统 2018上海太阳能光伏建筑一体化展览会【时间及官网】
太阳能信号灯充电系统 2018上海太阳能光伏建筑一体化展览会【时间及官网】 Canon America推出四款新的大幅面打印机
Canon America推出四款新的大幅面打印机
预售地址在哪里