工业机器人和机器人视觉系统
电脑杂谈 发布时间:2020-05-15 19:21:06 来源:网络整理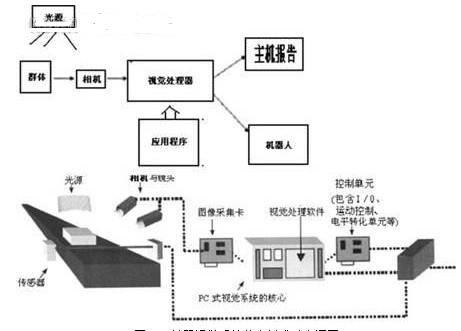
人类必须依靠自己的器官来完成一系列基本活动,例如生活,工作和学习. 除了大脑,最重要的是我们的眼睛. (工业)机器人也不例外. 没有完整而先进的视觉系统,很难想象生产任务.
机器视觉系统使用机器代替人眼进行各种测量和判断.
它是计算部门的重要分支,它集成了光学,机械,电子,计算机硬件和软件中的技术,涉及计算机,图像处理,模式识别,人工智能,信号处理,光机械集成等. 多个领域图像处理和模式识别等技术的飞速发展也极大地促进了机器视觉的发展.

机器视觉系统的应用
在生产线上,当人们进行这样的测量和判断时,由于疲劳和个体差异,他们将产生错误和错误,但是机器将不知疲倦并稳定地继续运行. 一般来说,机器视觉系统包括照明系统,镜头,照相机系统和图像处理系统. 对于每种应用,我们都需要考虑系统的运行速度和图像的处理速度,是否使用彩色或黑白相机,是否要检测目标的尺寸或目标是否有缺陷,需要多大的视野,需要多高的分辨率以及需要多少对比度等等. 从功能的角度来看,典型的机器视觉系统可以分为: 图像采集部分,图像处理部分和运动控制部分

机器视觉系统的工作过程
·完整的机器视觉系统的主要工作过程如下:
·1.工件定位检测器检测到物体已移动到摄像机系统视场中心附近,并向图像采集部分发送触发脉冲.
·2.图像获取部分分别根据预设程序和延迟向相机和照明系统发送启动脉冲.
·3.相机停止当前扫描并重新开始新的帧扫描,或者相机在开始脉冲到达之前处于等待状态,并在开始脉冲到达之后开始帧扫描.
·4.在相机开始新的帧扫描之前打开曝光机制,可以预先设置曝光时间.
·5.另一个启动脉冲打开照明灯. 灯光的开启时间应与相机的曝光时间相匹配.
·6.照相机曝光后,一帧图像的扫描和输出正式开始.
·7.图像获取部分接收模拟视频信号并通过A / D将其数字化,或者直接接收由摄像机数字化的数字视频数据.
·8.图像获取部分将数字图像存储在处理器或计算机的存储器中.
·9.处理器处理,分析和识别图像以获得测量结果或逻辑控制值.
·10.处理结果控制管道的移动,执行定位并纠正移动错误.
机器视觉系统的优点是:
·1.非接触式测量不会对观察者和被观察者造成任何损害,从而提高了系统的可靠性.
·2.具有更宽的光谱响应范围,例如,使用人眼不可见的红.

·3.长时间稳定工作,人类很难长时间观察同一物体,并且机器视觉可以长时间执行测量,分析和识别任务.
·4.机器视觉系统的应用领域越来越广泛. 它已广泛应用于工业,农业,国防,交通,医疗,金融,甚至体育,娱乐等行业. 可以说,它已渗透到我们生活,生产和工作的各个方面.
科幻电影中的智能机器人
▼

如下图所示,是由计算机控制的加工机械设备:

简单来说,视觉系统可以归纳为三个独立且相互关联的模块: 目标图像获取,图像处理和命令发布.
视觉系统的设计分为软件设计和硬件设计两个部分.

视觉系统的硬件设计

视觉系统的硬件主要由镜头,照相机,图像采集卡,输入和输出单元以及控制设备组成.
视觉系统的质量取决于相机像素级别,硬件质量,更重要的是取决于各种组件的协调和合理使用.

在恶劣的自然环境中,在生产的第一线,在许多复杂的情况下,为了确保整个视觉系统的正常运行,系统的各个硬件组件必须具有良好的耐磨性并承受不可预测的情况和测试.
随着技术的进步以及对现代生产和生活的需求,视觉系统在机器(尤其是智能机器)上正在迅速发展. 原始系统硬件无法适应新需求. 为此,必须提高硬件的水平和质量. 确保系统正常运行.
镜头,相机,图像采集卡,输入/输出单元和控制设备的结构类似于计算机监视器,电源和主机(处理器,内存模块,硬盘驱动器,视频卡等),并且每个组件都很关键. 他们如果质量不够高,整个机器将无法正常工作,更不用说完成复杂的工作和任务了.

视觉系统的软件设计
视觉系统的软件设计非常重要. 在当前信息化趋势下,智能控制越来越依赖于软件的功能.
视觉系统的软件设计是一个复杂的主题,不仅要考虑程序设计的优化,而且还要考虑算法的有效性以及在软件设计过程中是否可以实现,我们必须考虑可能发生的问题.
视觉系统的软件设计完成后,必须检测其鲁棒性并进行改进以适应复杂的外部环境(鲁棒性是系统的鲁棒性. 这是异常和异常情况下系统生存的关键. 危险情况. )


视觉导航软件处理流程图
▼

视觉系统的实际应用

目前,随着城市交通,并进行了大量的研究. 在模拟实验中,许多子系统已经能够最初达到人们想要的智能水平. 越来越多的事实证明机器人视觉系统,先进的ITS将有效地利用现有的交通设施,减轻交通负荷和环境污染,确保交通安全,提高运输效率,促进社会经济发展,改善人们的生活质量,并能够促进社会信息化和形成新产业. 基于机器视觉技术的城市交通预警系统是高级交通管理系统的子系统. 它是一种智能监控系统,可根据交通状况的变化通过预警与交通管理配合使用.
基于机器视觉技术的城市交通预警系统架构框架
机器人视觉
机器人视觉硬件主要包括两部分: 图像采集和视觉处理. 图像采集由照明系统,视觉传感器,模数转换器和帧存储器组成. 根据功能的不同,机器人视觉可分为视觉检查和视觉引导两类,广泛应用于电子,汽车,机械等工业领域以及医疗和军事领域.
-------结束-------
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-211035-1.html
 五笔通用输入法手机版_五笔通用输入法官方下载_五笔通用电脑版免费下载
五笔通用输入法手机版_五笔通用输入法官方下载_五笔通用电脑版免费下载 华为c2600手机_华为c2600_华为c2856
华为c2600手机_华为c2600_华为c2856 gps 定位精度 北斗卫星加快组网脚步 杨长风:定位精度可达亚米甚至厘米级
gps 定位精度 北斗卫星加快组网脚步 杨长风:定位精度可达亚米甚至厘米级 买了尼康FE,但是今天爱上了奥林巴斯om1的颜值,想入手一个
买了尼康FE,但是今天爱上了奥林巴斯om1的颜值,想入手一个
为什么是这样的