移动机器人室内自主导航设计+CAD图纸(2)
电脑杂谈 发布时间:2019-04-27 05:18:01 来源:网络整理
Key words: mobile robot, autonomous positioning, autonomous navigation and obstacle avoidance design
目录
第一章 绪论.. . . . . . ..4
1.1引言. . . . . 4
1.2移动机器人发展状况. . . 4
1.3移动机器人定位技术发展状况. . . ..5
1.4移动机器人定位导航课题研究背景. . . .5
关键字描述:正式版 升级 方法 版本 任意 ucenter home 数据 备份ucenter home 1.5 正式版为开源产品,升级之前请注意首先要将 ucenter 升级到 1.5.0 版本,ucenter 1.0.0 到 ucenter 1.5.0 图文升级教程。②按经验公式估算来确定直径d:d=(1.5-3)dmax (dmax缉弧光旧叱搅癸些含氓 支管最大直径)。
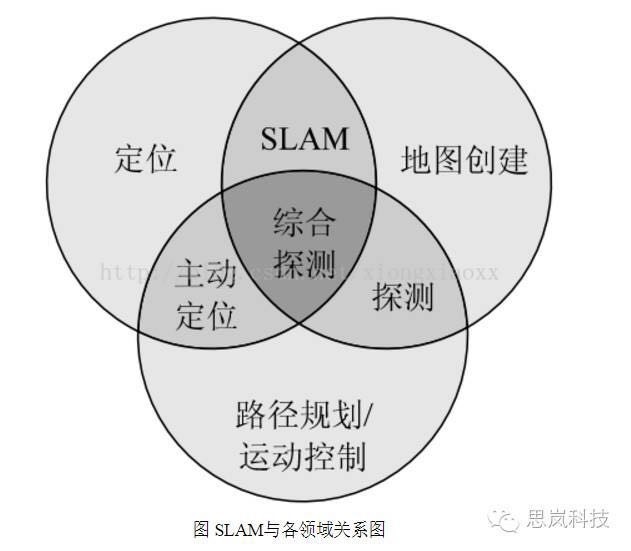
2.1常用移动机器人自主导航方法调研. . ..7
2.2本课题所研究的移动机器人导航定位方式. ..10
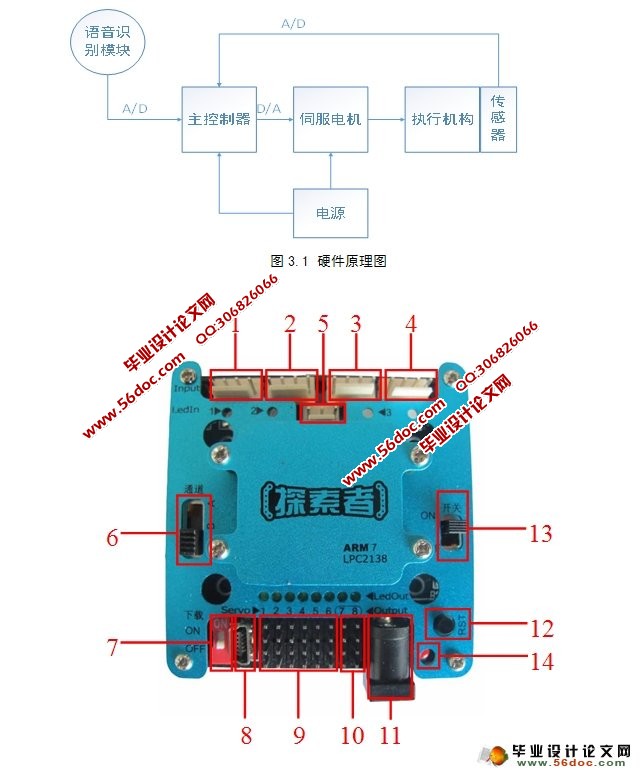
2.3移动机器人自主导航常用硬件及本课题所选用硬件. .10
2.4机器人自主导航软件编程部分. . . .12
2.5移动机器人常用避障方法课题调研. . .12
2.6本课题所研究的移动机器人障碍物规避方式. .13
第三章移动机器人惯性导航定位系统基本理论. .15
3.1惯性导航元件工作原理. . . .15
3.2惯性定位系统的设计要求. . . . 15
3.3系统性能要求. . . . 15
3.4惯性定位系统的体系结构设计. . . .. .16
3.5惯性导航硬件设计 . . . . ..17
3.6硬件测试. . . . . .17
3.7实验电路图实物连接图与线框图. . . ..18
3.8本设计采用所电源型号. . . .. .19
第四章移动机器人惯性导航系统仿真调试实验.. 21
4.1惯性定位系统的软件设计. . . .22 移动机器人室内自主导航设计+CAD图纸:
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-94425-2.html
-

-
晋康帝
就当他无害通过
-
陈瑞斌
给生的希望
 高铁通信网设备安装要求
高铁通信网设备安装要求 中国联通/电信宣布手机相互兼容,真正实现网通
中国联通/电信宣布手机相互兼容,真正实现网通 win7系统电脑显示器模糊的解决方法,遇到问题怎么办
win7系统电脑显示器模糊的解决方法,遇到问题怎么办 漏泄电缆多长加放大器 德州SD42-PZ/C表欢迎您√
漏泄电缆多长加放大器 德州SD42-PZ/C表欢迎您√
有人需要便宜的