整流器会产生几次谐波_svpwm整流器直流侧电压_基于 pwm 整流器的 svpwm 谐波分析新算法
电脑杂谈 发布时间:2017-01-21 13:15:25 来源:网络整理
随着电力电子的发展,pwm整流器在有源滤波、超导储能、可再生能源(太阳能、风能)的并网以及四象限交流电动机驱动等场合已经得到越来越多的应用。相对于传统的两电平变换器,中点钳位式三电平变换器由于具有独特的优势,成为高压大容量应用场合的研究热点之一。因此将三电平技术应用于pwm整流器无疑在高压大容量场合更具吸引力,不仅能够实现网侧电流谐波小、功率因数可控、能量能够双向流动等目标,而且同时具有器件承压低、开关频率低、输出谐波小和dv/dt小等三电平变换器的优点。本文提出一种适于三电平pwm整流器的svpwm调制优化算法,该算法在60°坐标系的基础上,优化了传统svpwm算法中扇区确定过程,并提出了相应的基本电压矢量选择,作用时间计算。最后通过matlab仿真验证了该算法的有效性[1-2]。
2 三电平整流器的拓扑结构
目前,多电平的拓扑结构主要有四种:二极管中点钳位型,飞跨电容型,具有独立直流电源级联型,混合级联型。常见的二极管钳位型变换器的拓扑结构简单,应用广泛,控制策略也比较简单[3]。
图1三电平pwm整流器的拓扑结构
图1为二极管钳位型的三电平pwm整流器的拓扑结构。每相有4个主开关器件、4个续流二极管、两个钳位二极管,当sa1和sa1同时导通时,则a点对n点的电平为udc/2,其中udc为直流母线电压;当sa2和sa3同时导通时,输出电平为0;当sa3和sa4同时导通时,输出端电平为-udc/2。
3 三电平svpwm算法
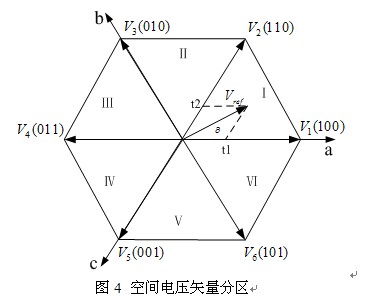
svpwm应用于三相电压型pwm整流器,主要是因为svpwm电压利用率高,动态响应快等优点。三相三电平整流器的空间电压矢量描述了其交流侧相电压(ua,ub,uc)在复平面上的空间分布,定义开关变量sx(x为a,b,c)代表各相桥臂的输出状态,则各相电压表示为可得:
(1)
其中,sx为1时第x相输出电平为p;sx为0时第x相输出电平为o;sx为-1时第x相输出电平为n。故三相三电平整流器合成电压状态有27种组合,对应的空间矢量数为27种,其中有效电压矢量有19种,其余为冗余矢量,分布如图2所示。
图2 三电平空间电压矢量图
按其幅值大小可分成4类:大矢量、中矢量、小矢量、零矢量。基于 pwm 整流器的 svpwm 谐波分析新算法大矢量6个,其对应的输出为p,n两种开关状态所组合;中矢量6个,其对应的输出是p,o,n 3种开关状态的组合;小矢量有6个,每个矢量对应两种开关状态,形成一组冗余矢量,其中一种对应的输出只是p,o开关状态的组合,称为p型矢量,另一种的输出只是n,o开关状态的组合,称为n型矢量;零矢量有3个,分别为nnn,ooo,ppp。
4 60°坐标系svpwm算法
传统的svpwm算法将三电平空间矢量图在α-β平面上分成6个大扇区,每个扇区分为4个三角形小扇区,共有24个三角形小扇区。在α-β平面上,三电平空间矢量之间的角度都是60°的倍数。根据这一特点,可以采用非正交的60°坐标系,以简化参考电压矢量所在扇区的确定及基本矢量的选择和作用时间的计算[4~6]。
4.1 60°坐标系
假设60°坐标系为g-h坐标系,令g轴和α-β坐标系中的α轴重合,逆时针转60°为h轴。
图3是参考矢量ur在α-β坐标系和g-h坐标系的矢量分解图,坐标值分别为(urα,urβ)和(urg,urh),根据线性关系可以得到两种坐标的变换式:
(2)
当以a-b-c坐标形式表示时,设三相电压为u(a,b,c),则由clark变换可得在g-h坐标系中的电压矢量形式,其变换为:
(3)
4.2 基本矢量选择
令ur在g轴上的投影向上取整urgc,向下取整值为urgf,在h轴上的投影向上取整urhc,向下取整值为urhf。可知u必落在以(urgc,urhf),(urgf,urhc),(urgf,urhf),为顶点的平行四边形内,易发现u1(urgc,urhf)和u2 (urgf,urhc)总是两个距离最近的矢量,第3个矢量是剩下的两个矢量中与参考矢量ur落在(urgc,urhf)和(urgf,urhc)所形成对角线的同一侧的矢量u3,在每个扇区中由以上3个基本矢量u1,u2,u3可合成ur。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-27812-1.html
-

-
高浩天
树欲静而风不止
-
丁瑞华
002515
-
 索尼头戴式3D显示器评估
索尼头戴式3D显示器评估 canus_caprina羊奶皂_camus
canus_caprina羊奶皂_camus 《同轴电缆》是哪个意思、怎么读、近义词和反义词有什么
《同轴电缆》是哪个意思、怎么读、近义词和反义词有什么 手持式移动数据终端 手持终端助力森林防护巡检,实现国家“科技兴林”
手持式移动数据终端 手持终端助力森林防护巡检,实现国家“科技兴林”
当然到场支持了