基于单片机的智能汽车设计(最终版)
电脑杂谈 发布时间:2020-05-16 18:23:01 来源:网络整理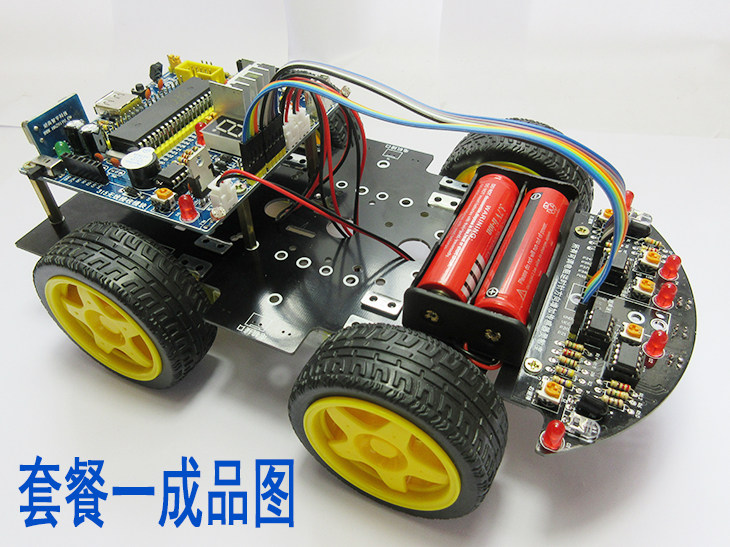
1. 汽车设计[J]自动化与仪器仪表,(): + []沉江江,齐银鹏,陈方超,陈宇,梁浩基于单片机的智能汽车机器人[J]电子设计工程,,(): [ ]张德玉,侯立刚,张晓勇,常龙坤基于MCSXS单片机的智能汽车系统设计[J]电子设计工程,,(): + []张为娟,王菊,李坤智能环保汽车设计[J]电子质量,(): []何光峰,王凌云,徐家鹏基于模块化控制的智能车设计[J]现代电子技术,(): + []姜宝华,齐强机N输出电压有两种方式,一种是通过调节电源直接输出电压;另一种是通过电源调节直接输出电压. 另一种是直接使用微控制器上的输入和输出端口来提供电压信号. 驱动芯片可以驱动直流电动机. 使能端子ENA和ENB为高电平. 控制模式和直流电动机状态表如下所示. 如果要控制PWM直流电动机的速度,则需要设置IN和IN,确定电动机的旋转方向,然后使
2. 我们通常使用的晶体振荡器频率为MHz. 在这种情况下,微控制器的每个机器周期均为us,因此在使用微控制器时钟进行计时时更加方便. 图最小化的SCM系统程序设计主程序设计概述在汽车的总体设计过程中,不仅拥有大量的硬件电路设计,更是对系统软件的分析和设计. 因为在硬件电路建立之后,只有通过软件程序的控制,才能按照设想的行驶路线来驱动汽车,以实现所需的功能. 由于汽车的整体功能更多,因此,如果在程序设计的开始进行整体设计,无疑会给整个设计工作带来困难,并且在设计完成后运行调试时也会遇到困难. 完成. 因此,在设计程序时,我采用了模块化设计,即先设计每个部分子功能模块,然后在验证每个功能程序的完整性和正确性之后,再将每个子程序组合成一个完整的程序. 主程序流程图开始确定是否有黑线车沿黑线行驶,以确定是否有障碍物以确定是否有黑线车沿黑线行驶

3. 为了清楚地了解汽车的电动机转向控制信号,该表列出了每个IO的控制信号. 通过对其进行不同的更改,您可以在不同条件下选择电动机的各种运动状态,以获取汽车行驶的数据. 汽车跟踪调试汽车跟踪是通过五向红外管实现的. 当左侧检测到黑线时,左侧LED指示灯将亮起. 当右指示灯点亮时,则汽车检测到的黑线在右侧(图片),如果当汽车处于黑线中间时,中间指示灯点亮,此时,汽车将继续遵循黑线. 在跟踪测试过程中,黑线的宽度也对我们的跟踪成功有一定的影响. 因此,我还对黑线的宽度进行了测试. 结果显示在表中: 当在汽车的行驶路线上放置障碍物时,如果检测到障碍物,汽车将在安全距离内旋转以避开障碍物. 可以通过测试汽车的各种功能来找到汽车的功能. 在合适的工作条件下,该车基本可以满足设计要求. 因此,此设计需要提前完成
4. 可以输出PWM脉冲来实现速度控制. 请注意,当使能信号有效时,电机自由停车;如果启用了ENA信号,并且IN和IN均为OR,则电机处于制动状态. 表LN驱动状态表ENAINIIN直流电动机状态XX停车制动器正向旋转反向制动器跟踪电路图跟踪模块框架的避障部分在设计汽车跟踪电路时,我们必须考虑红外管何时检测到黑线. 继续. 首先,将红外对管接收到的光信号转换为电流信号,然后将模拟电流信号转换为数字信号. 红外探测障碍物并绕过障碍物. 该模块使用红外发射器沿特定方向发射红外线. 红外线在空气中传播. 当他们在途中遇到障碍时,他们会立即返回. 红外接收反射的光,并通过相应的电路对其进行处理. ,确定障碍物的方向和距离,并向汽车发送控制信号,使汽车绕过障碍物. 主控制电路设计汽车的主控制电路以单片机为控制芯片,结合复位电路和晶体振荡器电路来控制整个系统的运行. 电路中

5. 基于单片机的无线遥控智能汽车的设计与制造[J]电子世界,(): [李宁,张殿福基于单片机的智能汽车速度控制设计[J]科技远景, ((): + []顾群,蒲树雷设计基于单片机的智能小车避障与跟踪系统[J]数字技术与应用,,(): []史宏宇基于单片机的智能小车设计芯片计算机[J]仪表技术,,(): 图MCU引脚图电源选择本设计使用额定电压为V的单芯片系统. V的驱动系统可使汽车平稳行驶,并且不会由于在驾驶过程中电压过高而被烧毁. V电压可以确保驾驶需求,但同时也增加了的使用频率. 总体方案设计和设计任务说明本章主要简要介绍t的选择他对系统的整体计划和整体设计的想法进行了探讨. 在以下各章中,整个系统分为三个部分: 机械结构,控制模块和控制算法. 引言分析. 设计任务说明: 巩固已学到的理论知识,并能深刻理解单片机的基本原理
6. 使用可以发光的红外二极管进行照明,例如,将红外线以光电流的形式连接到电路,并使用产生信号的通电系统. 使用此模块的优点是光电信号随着光的变化而变化. 它显然受光强度的影响. 此次设计的智能汽车充分考虑了汽车成本,实用性能等相关因素. 出于多种考虑,此设计使用红外线跟踪电子管. 红外灯管的优点是可以将信号转换为光电信号. 具体的是(如图所示). 通过使用光敏器件和光电转换器件来实现. 它主要使用光学信息源和红外光学信息源对. 间接辐射一定量的光能,它将信息光能携带到红外对管中,然后利用红外光对它进行照射,需要模拟一个常规光源单片机智能小车,输出的信息经过转换后将转换为数字量输出模拟相应的符号. 图红外光电传感器的工作原理避障模块技术在系统设计过程中,我们需要设计一辆能够自动搜索和搜索的汽车

7. 在对C的IO端口进行输入处理后,用于汽车运动控制决策,电机控制信号由P端口输出. 根据系统计划的设计,系统应包括以下模块: STCC主控制模块,路径检测模块,电源模块,电机驱动模块,EDNK红外避障传感器,TCRT红外反射式接近开关传输模块,辅助调试STCC主控制模块作为整个智能汽车的“大脑”,红外避障和接近开关传感器信号,根据控制算法做出控制决策,并驱动直流电动机完成对汽车的控制. 智能车. 电动机驱动模块驱动直流电动机以完成智能车的前进,停止和其他功能. 红外避障模块检测障碍物,接近开关检测路况. 硬件电路设计电源电路是在汽车的电源系统中设计的. 它使用V DC电源. 为了防止在错误操作期间连接过多电流并导致整个电路烧毁,通常在电路中插入击穿电容器. 图V电源模块图驱动器电路设计图驱动器电路框架图设计驱动器电路部分时,通常必须考虑选择驱动器芯片
8. 功能结论是指参考方法以外的方法. 硬件生成的方法主要是使用波形的调制信号来改变要随波形传输的信息. 由于更容易在三角形中实施系统控制,因此也更容易使用参数进行调整. 因为复数信号是不同正弦信号的叠加. 使用正弦波信号来实现PWM波的调制,使用该信号更容易生成信号. 使用PWM改变波形时,只需对软件程序进行简单修改即可实现对系统的控制. 由于硬件调制方式的电路为模拟电路,因此其结构较为复杂,在进行电路设计与施工时,比较和实现精确控制是不便的. 只要将PWM调制添加到控制程序中,软件生成方法就相对简单. 因此,我使用软件生成方法来实现PWM波形. 在跟踪模块技术汽车向前发展的过程中,我们必须考虑汽车行驶的敏感性. 因为只能保证汽车的强灵敏度,所以可以更好地探索汽车的行驶路线. 跟踪模块
9. 理论,硬件组成和工作过程,了解单片机的系统组成和相关模块的链接协调,正确设计各单元电路,合理编程汽车提前模式. 总体设计汽车的整体系统以单片机为CPU,红外线用于检测黑线进行跟踪和行走,超声波检测器用于检测障碍物,并具有避障功能被实现. 达到手推车的运动. 需求分析设计了一款智能汽车,借助TCRT红外反射式接近开关传感器和EDNK红外避障传感器,并通过STCC单片机对汽车进行实时控制单片机智能小车,首先,运动量不能超过以预定模式跟踪障碍物. 避障减速是在有障碍物和超车区域内实现超车. 这个周期继续. 整个方案系统使用AT的位微控制器STCC单片机作为智能汽车系统控制的核心控制单元. 选定的智能汽车系统采用EDNK红外避障传感器TCRT红外反射式接近开关跟踪方案后,路径信号通过ST
10. 设计任务以实现所有功能. 汽车可以执行跟踪功能. 在检测到黑线之后,它将沿着黑线前进. 可以执行避障功能. 检测到障碍物后,汽车将通过原地旋转来执行避障过程,然后继续行驶. 结论此次设计的智能汽车系统已基本达到预期目标,并已建立功能. 设计中克服了两个主要问题. 一种是较复杂的电路焊接和检查. 进一步提高焊接技术和检查电路的实际操作能力. 其次,在软件设计中编写程序是当务之急. 实际编写每个模块并不难. 很难编译各个部分的兼容性,尤其是检测和计数. 编写技巧以及将多个程序组合在一起的几点要点. 简而言之,这种系统设计使我更深入地了解了系统单片机的工作原理,并提高了使用它的能力. 参考文献[]许开军,刘飞龙基于Arduino平台的智能车的设计[J]电子世界,,(): []聂如基于蓝牙远程控制的智能车
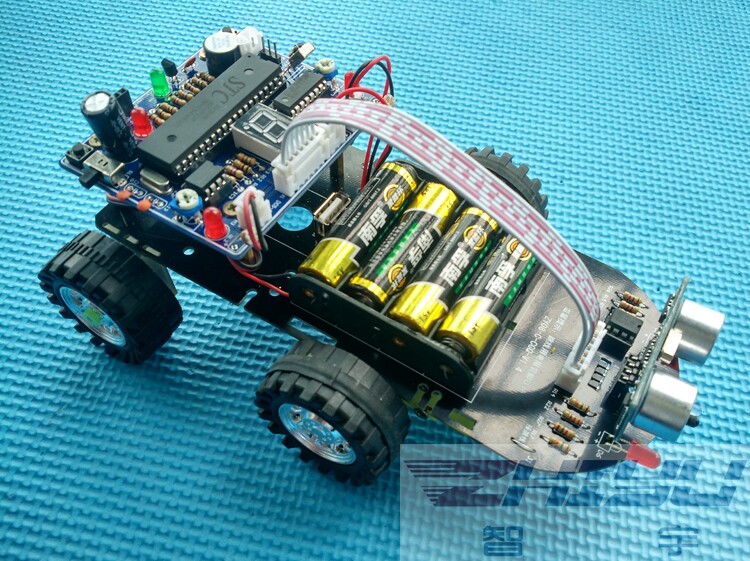
11,LN和LD两种芯片选择. 对于LN芯片,它采用直插式封装模式,具有四通道驱动逻辑电路,可以轻松驱动两个电机. 而且其工作电压和单通道输出电流都比较高,通常可达到的V和ALD在功能上与LN基本相同,但其工作电压和通道电流小于使用直接插入SOIC封装模式的LN. 因此,在应用中,通常使用LN代替LD. 从经济角度来看,LN也具有优势. L,安装高度应适当. 对于驱动模块和最小的单芯片系统,将其安装在手推车的中间,因为它需要与每个模块连接. 电源位于汽车的后部,有利于汽车总重量的均匀分布,充电时也更便于拆卸和重新组装. 调试汽车的运动模式调试汽车的左转和右转时,可以在程序中提供每个电动机的插针信号,以查看汽车的旋转方向是否符合设定方向. 通过调试,可以看到手推车的移动方向与初始设置相同,可以实现
12. 驱动结束YNYNYN图系统程序流程图驱动程序流程图启动CPU处理驱动机轿厢前端图驱动程序流程图跟踪程序流程图开始终点检测黑线向左或向右黑线左电机旋转右电机使YN图旋转跟踪程序流程图. 避障程序流程图开始,以判断汽车是否有障碍物行驶. 汽车结束了. 汽车行驶. NY图避障程序流程图. ,我们开始组装整个汽车. 将购买的由高强度塑料制成的模型用作汽车的车身,然后根据功能安装并固定每个模块. 红外跟踪模块固定在车身底部,因为其功能是检测地面上是否存在黑线,并且其工作距离也受到限制,因此不能将其放置在离地面太高的位置. 超声波检测模块应直接放置在汽车前方,其目的主要是用于查找驾驶员前方障碍物的程序流程图,跟踪程序流程图,避障程序流程图的生产安装以及汽车运动的调试安装模式调试汽车跟踪调试小型汽车避障调试
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-212188-1.html
![[中国移动通信集团广州广州分公司]地址,电话,路线,周边设施](http://pic19.photophoto.cn/20110622/0017030033067592_b.jpg) [中国移动通信集团广州广州分公司]地址,电话,路线,周边设施
[中国移动通信集团广州广州分公司]地址,电话,路线,周边设施 节奏大师手机游戏(适用于Android)v2.0.4.10(适用于Android)
节奏大师手机游戏(适用于Android)v2.0.4.10(适用于Android) 第三方短信软件 iOS短信怎么恢复? 教你一招轻松恢复
第三方短信软件 iOS短信怎么恢复? 教你一招轻松恢复 144芯不锈钢光缆交接箱
144芯不锈钢光缆交接箱
声音纯粹干净