[如何用蓝牙连接51单片机]
电脑杂谈 发布时间:2020-05-13 19:24:46 来源:网络整理
51单片机蓝牙车(我是二年级课程设计,菜鸟,欢迎您指正和参考. )
总结本设计选择基于蓝牙的智能汽车作为对象. 选择STC98C52RC单片机作为主控制芯片,电机驱动器采用L293N,电源部分采用两节3.7V锂电池供电. 使用C语言模块化编程来提高开发效率. 蓝牙控制功能. 使用按钮或控制汽车. p>
关键字
51个微控制器
L298N_电动机驱动器
蓝牙
目录
1前言1
11系统研究背景1
12系统研究的意义和目的1
2系统概述2
21系统结构2
22个系统功能2
23开发环境2
3系统实施3
31传感器技术3
32其他相关技术3
33硬件实现3
34个软件实现3
35系统测试3
4系统说明4
5摘要5
6参考6
1. 前言
1.1. 系统研究背景
蓝牙是一种用于在短距离内进行无线控制以及发送和接收的通信技术. 随着技术的飞速发展,蓝牙已经找到了发展空间. 它可以代替落后的数字硬件设备之间繁琐的电缆连接. 在创建蓝牙的初期,没有人期望蓝牙具有如此巨大的潜力和前景,并且由于蓝牙具有高安全性,低制造成本和低功耗等类似产品,因此当前的发展已完全超出了我们的期望. 它是其中最低的,因此它被许使用,并且在消费者中越来越受欢迎. 基于蓝牙技术的产品会不断更新并投放市场.
蓝牙技术是近年来出现的一种新技术. 它是用于短距离无线通信和信息传输的新通信技术. 它使数据线的硬件设备更易于接收. 它可以在世界范围内广泛使用,是蓝牙设置的通用范围,使用频率调制技术来防止外界干扰等等. 低成本,低功耗和小辐射,加密设置使蓝牙更安全;这些功能的广泛应用使蓝牙技术在我们的日常生活中得到广泛使用. 蓝牙还支持和. 多传输通信连接成为具有多个蓝牙的微型网络,并且还具有网络特性.
在当前的智能时代,汽车的智能控制方便人们使用. 基于51单片机,汽车的行驶由蓝牙控制.
1.2. 系统研究的意义和目的
由于无线技术的广泛使用,我们了解到,在研究无线和有线通信技术的方法中,蓝牙系统的小面积领域存在巨大的技术突破,蓝牙技术也已被广泛采用国际上以及市场上. 需求很大. 这也使蓝牙技术的发展成为趋势之一. 蓝牙可以发送和接收语音和数据,以满足大多数人的需求. 它还结合了其他相关产品的特性,因此技术变得更加多样化. 但是,蓝牙的安全性不足51单片机蓝牙接,并且在小范围内的点对多点通信受到很大限制. 这些本身需要改进和完善.
可以使人们更方便,更轻松地控制汽车. 实现汽车的无线控制,摆脱有线控制的不便,更加智能.
2. 系统概述2.1. 系统结构
系统框图
2.2. 系统功能
基于51单片机,驱动程序由蓝牙控制. 该驱动器可以将5〜12V的电压转向,一部分传递至车轮,另一部分通过降压,电压调节,最后降低至5V为该驱动器供电. 传感器电源.
2.3. 开发环境
AT89C5RC微控制器开发环境.
AT89C52是8位单片机,是对MCS-51单片机系列的某些功能进行升级后获得的产品. 它的作用基本上是在外部数据和命令的中断和时钟的帮助下,在自己的内部存储器上处理用户数据. AT89C52由8位内部处理器,内部数据存储(RAM,256字节),内部存储大小为8K,32个输入和输出双向端口,16位定时器和5个二级中断,一个全双工串行端口组成通信端口和时钟电路.
AT89C52可以自主执行给它的指令,也就是说,您将所需的指令写在微控制器的内部存储器上,它将逐步执行. AT89C52可以在极低的功耗条件下工作,将其设置为空闲选择和掉电模式两种状态以实现低功耗.
AT89C52
微控制器与外界之间的通信是通过其自己的I / O端口进行的. 微控制器I / O端口的控制就是微控制器的控制. I / O端口的存在不仅可以实现数据传输,而且可以改变信号的电平和性质. 最重要的一点是I / O端口可以实现与不同外部电路的连接,从而使微控制器正常工作.
在AT89C52单片机上,我们通常使用4个独立的双向通用I / O端口: P0端口,P1端口,P2和P3端口. 当外部设备的工作速率相对较低或较高时,我们可以使用同步传输方法,而单片机的异步传输是为了与硬件进行更简洁的传输. 也可以通过中断传输和DMA传输来完成. AT89C52单片机还可以实现外部接口单一寻址和外部端口与存储器统一编程的两种方式. AT89C52单片机上共有32个I / O端口. 不同的I / O端口的功能和操作都有各自的方式. 我还将使用此课程设计来更好地理解和更熟练地使用它们.
3. 系统实施3.1. 相关技术技术
蓝牙技术,驱动程序模块
3.2. 硬件实现
HC-06蓝牙模块
TX连接到微控制器的RX,RX连接到微控制器的TX,VCC连接到5V(或3.3V),GND连接到微控制器的地. HC-06蓝牙模块使用手机APP(蓝牙串行端口助手)作为中间介质,将相关数据发送到蓝牙串行端口助手中的串行端口. 内.
HC-06蓝牙模块
连接HC-06蓝牙模块和51单片机
L298N电机驱动模块,
该电机可以驱动两台直流电机,并且使能端子ENA和ENB在高频下有效,
左轮由IN1和IN2通过微控制器的输入信号控制,右轮由向IN3和IN4的输入信号控制.
IN1和IN2分别为0、1: 正向旋转
IN1和IN2分别为1,0: 反向
IN1和IN2分别为1,1,停止
IN1和IN2,分别为0、0: 停止
IN3和IN4分别为0、1: 正向旋转
IN3和IN4分别为1,0: 反向
IN3和IN4分别为1,1,停止
IN3和IN4,分别为0、0: 停止
L298N的主要引脚功能如下:
+ 5V: 芯片电压5V;
VCC: 电动机电压,最大可以连接到50V;
GND: 公共接地;
Output1-Output2: 输出端子,连接到电动机1;
Output3-Output4: 输出端子,连接到电动机2;

EN1,EN2: 高电平有效,EN1,EN2分别是IN1和IN2,IN3和IN4的使能端子;
Input1〜Input4: 输入端子,输入端子电平和输出端子电平对应;
L298N
3.3. 软件实现
程序流程图
51单片机,源程序:
位in1 = P1 ^ 0; //左电机
位in2 = P1 ^ 1; //左电机
位in3 = P1 ^ 2; //右马达
位in4 = P1 ^ 3; //右马达
char i;
/ *转发* /
无效前进()
{
in1 = 1;
in2 = 0;
in3 = 1;
in4 = 0;
}
/ *返回* /
后退()
{
in1 = 0;
in2 = 1;
in3 = 0;
in4 = 1;
}
/ *向左转* /
左左()
{
in1 = 1;
in2 = 1;
in3 = 1;

in4 = 0;
}
/ *向右转* /
无效右()
{
in1 = 1;
in2 = 0;
in3 = 1;
in4 = 1;
}
/ *停止* /
无效停止()
{
in1 = 1;
in2 = 1;
in3 = 1;
in4 = 1;
}
void main(void)
{
TMOD = 0x20; //将T1设置为工作模式2
TH1 = 0xfd; //加载初始值,比特率为9600bps
TL1 = 0xfd;
TR1 = 1; //打开T1
REN = 1; //获得许可
SM0 = 0; //方法1
SM1 = 1;
EA = 1; //打开全局中断
ES = 1; //打开串口中断
同时(1)
{i = SBUF; // SBUF是微控制器接收到的数据,微控制器接收到的数据存储在SBUF中;
RI = 0;
if(i == 0x02){forward();} //如果蓝牙助手发送0x02,则汽车将前进
if(i == 0x08){back();} //如果蓝牙助手发送了0x08,则汽车将后退
if(i == 0x01){left();} //如果蓝牙助手发送0x01,则汽车向左转

if(i == 0x03){right();} //如果蓝牙助手发送0x03,则汽车向右转弯
if(i == 0x05){stop();} //如果蓝牙助手发送0x05,则汽车将停止
}
}
3.4. 系统测试
汽车可以实现基本功能并通过蓝牙成功控制汽车. 经过一段时间的测试,单片机稳定运行,蓝牙稳定控制,汽车在控制方向上走得更好.
4. 系统说明
1. 在手推车上安装两节锂电池以供电.
2. 打开总开关,在手机侧,打开一个蓝牙通讯助手(您可以在手机应用程序商店中找到下载内容),连接这辆车的蓝牙(HC-06),如图所示:
蓝牙HC-06模块
3. 然后可以在手机上按相应的前进,后退,左,右,停止等,如图所示:
APP
分析: 前进,后退51单片机蓝牙接,左转,右转,停止,全部对应程序中的相应信息,如图所示;
当手机向蓝牙模块发送0x02时,它将执行forward()功能;汽车会前进
当手机向蓝牙模块发送0x08时,将执行back();功能;汽车会倒退
当手机向蓝牙模块发送0x01时,将执行左();功能;汽车会向左走
当手机向蓝牙模块发送0x03时,将执行right()功能;汽车将向右行驶
当手机向蓝牙模块发送0x05时,将执行stop()功能;汽车将停止
特定的编辑图片:
APP2
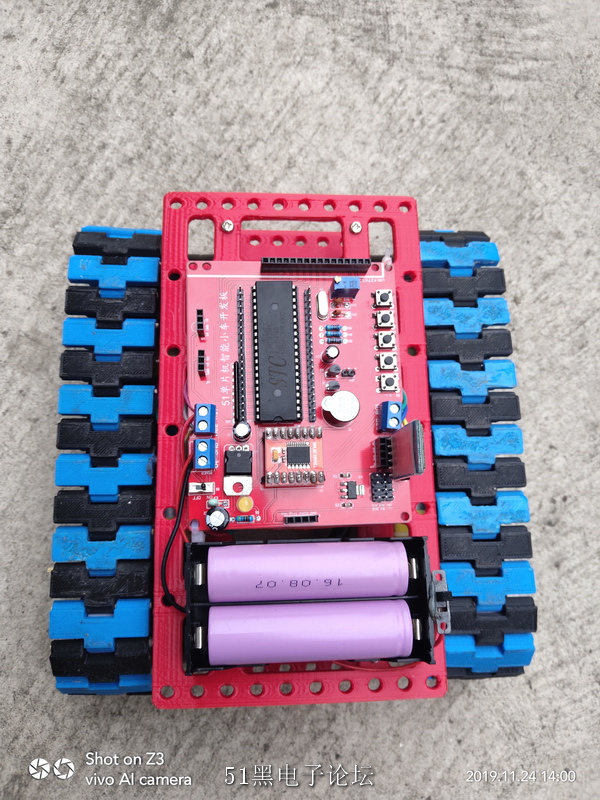
最后,这是汽车的整体模型;
总图片
注意: 上面有一个RC522读卡器,方便以后的课程,在这里您可以忽略哈萨克斯坦.
5. 摘要
此设计使用STC89C52RC微控制器,这主要是因为微控制器的稳定性更好并且执行指令的速度较快. 也可以使用其他系列的单片机. 电机驱动采用L293N,电压稳定,电源充足,对直流电机的控制稳定;电源部分采用两节3.7V锂电池供电,电压稳定,电流充足,还可以充电,节能环保. 使用C语言进行模块化编程可提高开发效率. 蓝牙控制功能. 使用按钮或控制汽车. 简单方便. 经过不断的搜索,患者的指导和热情的帮助,设计基本完成.
经过本课程的设计,我深刻认识到学习知识的重要性,也了解了理论与实践相结合的意义,并测试了两年大学学习的成果. 尽管在这种设计中,知识的应用和连接仍不熟练. 但是我会继续努力,并在以后的工作和学习中不断提高. 这两个月的设计是系统地改进和扩展过去所学知识的过程,为将来的发展奠定了良好的基础. 由于其级别有限,设计中肯定存在很多缺陷,请批评指正.
6. 参考
C编程语言: 清华大学出版社作者: 血液净化
51个微控制器C语言教程: 电子工业出版社,作者: 误区
希望对您有帮助.
为方便起见,我将移动APP上传到了网络磁盘上
提取代码: wn7k
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-208978-1.html
-

-
孔温业
世界格局由美国一超独霸转向多极并起并存的时代——更是中华盛世主导世界时代的到来
-
卢邺
答
 智能电表购销合同范本_水果购销合同范本600字_购销合同范本简洁版
智能电表购销合同范本_水果购销合同范本600字_购销合同范本简洁版 山东移动4g流量卡本人亲身经历告诉你淘宝刷单真相,刷一单多少
山东移动4g流量卡本人亲身经历告诉你淘宝刷单真相,刷一单多少 mecanum轮全方位移动机器人技术以及应用 王兴松
mecanum轮全方位移动机器人技术以及应用 王兴松 no.7信令网由什么组成_7号信令网使用方法_信令网
no.7信令网由什么组成_7号信令网使用方法_信令网
您好