单相全桥逆变器的基本控制技术
电脑杂谈 发布时间:2020-05-13 01:00:49 来源:网络整理
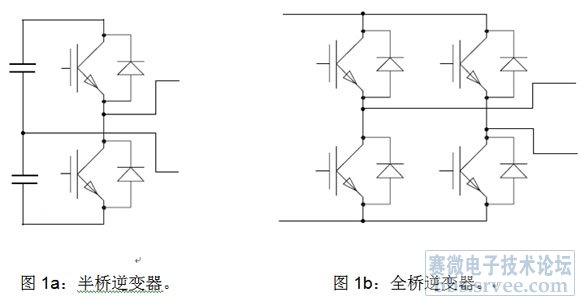
SPWM控制2.磁滞控制SPWM控制单相全桥逆变器拓扑逆变器的两种调制技术开关频率是固定的,等于载波频率,并且高频滤波器的设计很方便. 与磁滞比较控制方法相比,此控制方法的输出电流中包含的谐波SPWM磁滞调制使用瞬时值比较方法,尽管缺点是开关频率不固定,从而使滤波器设计困难(可变环路可以设计宽度控制该策略使开关频率稳定,但具有自动峰值限制,高电流跟踪精度,快速动态响应,独立于负载参数和无条件稳定性的优点. 磁滞控制的等效面积原理面积对于PWM(脉宽调制)控制技术很重要. 理论内容. 原理: 当将具有相同脉冲和不同形状的窄脉冲添加到惯性链中时,效果基本相同. 脉冲指的是面积窄脉冲,效果基本相同,表示输出响应波形的链接基本相同. 如果通过傅立叶变换分析输出波形,则低频频段非常接近,高频频段仅稍有不同. 使用PWM波代替正弦半波将把正弦半波视为/ N的N个连接脉冲宽度,但是幅度的顶部由脉冲序列组成,其脉冲序列根据正弦定律变化. 放置上述脉冲序列,而是使用相同数量但幅度相同但宽度不相等的矩形脉冲,使矩形脉冲的中点与相应正弦波部分的中点重合,并使矩形脉冲的面积(脉冲)并且对应的正弦波部分相等,这就是PWM波形: 对于正弦波的负一半,也可以以相同的方式获得PWM波形.
脉冲宽度根据正弦定律变化,并且等效于正弦波PWM波形,也称为SPWM(正弦PWM)波形. SPWM控制计算方法根据逆变器电路半个周期中的正弦波输出频率,振幅和脉冲数全桥逆变器,准确计算PWM波形中每个脉冲的宽度和间隔,并控制逆变器电路中的每个开关器件将计算结果打开和关闭,即可获得所需的PWM波形,这种方法称为计算方法. 计算方法非常繁琐. 当要输出的正弦波的频率,幅度或相位改变时,结果也会改变. 调制方法将期望的输出波形作为调制信号并将调制后的信号作为载波,并且通过对信号波进行调制来获得期望的PWM波形. 通常使用等腰三角波或锯齿波作为载波,其中等腰三角波最常用. SPWM实现单极性PWM控制模式. 调制信号u的负一半是负三角波. 在电流的正一半,V1始终导通. SPWM控制双极性PWM控制模式在调制信号u相交时控制每个开关设备的开关. 在的半个周期中,三角波载波具有正和负,并且生成的PWM波也具有正和负,并且正半个负周期,每个开关装置的控制律是相同的. SPWM控制在正弦波和三角波的自然交点处控制电源开关设备的接通和关断. 这种产生SPWM波形的方法称为自然采样方法. 常规采样法是一种广泛应用的工程实践方法,其效果接近自然采样法,但计算量远小于自然采样法.

方法描述在三角波的两个正峰值之间采样一个周期T,以使每个脉冲的中点与相应的三角波中点(即负峰值)对称. 在三角波的负峰值时间t,对正弦信号波进行采样以获得点D. 水平直线和三角波分别穿过点D到达点A和点B. 在点A,时间t控制功率开关设备的开关. 可以看出,通过这种常规采样方法获得的脉冲宽度与通过自然采样方法获得的脉冲宽度非常接近. 将10SPWM控制和正弦调制信号波的确定设置为正弦信号波的角频率. 可以从图中获得以下关系. 磁滞控制磁滞比较方法包括单极性磁滞控制和双极性磁滞跟踪控制. 存在三种类型的可变环路宽磁滞控制. 磁滞控制也分为两种: 电流型和电压型. 电流磁滞跟踪控制使用最新的电流磁滞跟踪控制原理: 将电流参考信号i *与电感器电流i进行比较,以获得电流误差信号i * -i,电流误差该信号通过磁滞比较器以生成控制信号开关管的信号,从而控制转换器输出电流的变化趋势,使其纹波始终在设定的正,负环路宽度内,从而达到准确跟踪参考电流的目的. 磁滞控制当电感器电流i大于电流参考信号S2,S3时,逆变器桥臂之间的输出电压为-Ud全桥逆变器,滤波电感器承受负电压,电感器电流下降;当电感电流i小于电流参考信号S1,S4时,逆变器桥臂之间的输出电压为Ud,滤波电感承受正电压,电感电流上升.
单极性磁滞控制磁滞控制在电流的正一半内,S1始终接通. 当电感器电流i小于电流参考信号i *且小于环宽度-H时,S4接通,逆变器桥臂之间的输出电压为Ud,滤波电感器受到正电压,电感电流上升. 当电感器电流i大于电流参考信号i *且大于环宽度H时,此时S2导通,逆变桥臂之间的输出电压为0,滤波电感器承受负电压,电感电流下降;当它处于电网电压时,在负半周中,可以进行类似的分析. 逆变器桥臂之间的输出电压为-Ud. 双极性磁滞控制磁滞控制可以根据一个周期内电流增加和减少值近似相等的原理来推导. 逆变器开关管的瞬时频率为: 传统滞后控制的优缺点: 滞后电流控制的优点是控制简单,系统响应快,实时跟踪参考电流变化以及负载和电路参数. 变化不敏感. 磁滞回线宽度H是固定的. 当输出电压Ug改变时,逆变器电源的开关频率f也将改变. 不固定的开关频率增加了逆变器输出滤波电路的设计难度. 环宽过大时,开关频率低,跟踪误差大. 当环宽度太窄时,跟踪误差很小,但是开关频率太高并且开关损耗增加. 当L大时,i的变化率小,跟踪慢. 当L较小时,i的变化率较大,并且开关频率太高. 磁滞控制缺点: 需要增加参考电流信号过零比较器;优点: 与单极磁滞控制相比,其中4个开关均在高频状态下工作,该控制方法仅需要2个开关在高频状态下工作,在这种状态下,开关损耗显着降低,从而提高了逆变器效率.

此外,谐波含量也降低了. 单极性与双极性磁滞控制性能比较磁滞控制固定开关频率,令f = F: 磁滞控制环路宽度由两部分组成: 固定的直流分量和两倍于电网侧电压频率波动的余弦分量在公式中,Kt1 Kt2和Kt2可由电路自身的参数确定,包括直流侧电源电压Ud,滤波器电感L和设置的开关频率F. 双闭环控制17逆变器输出的高频滤波可以得到理想的正弦波,为什么我们需要执行闭环控制?为什么需要闭环控制? 17双闭环控制18多闭环控制单闭环控制瞬时值反馈控制有效值恒定反馈控制变频器控制方法发展趋势数字控制模拟控制非线性控制,智能控制线性控制18双闭环控制电压和电流双闭环控制是电压外环,电流内环设计. 电压和电流双闭环控制双闭环控制电压环的功能是跟踪和稳定输出电压. 它的大部分设计都采用PI调节器模式. 电流环路的功能是加快逆变器的动态响应,增强负载适应性,并具有限制输出电流的能力,以提高系统的可靠性. 双闭环控制根据内环电流反馈的不同样本,逆变器的双闭环控制可分为两种类型: •电容器电流内环和电压外环: 使用滤波电容器电流时作为内环的反馈值,电容电流成为要控制的对象,电容器电流的微分效应将导致电容器输出电压提前得到校正. 这种双闭环控制的优点是对线性和非线性负载具有良好的动态抑制.
在这种双闭环控制中,限流环节只能限制电容器电流的大小,但负载电流和感应电流不受其限制. 因此,该控制的缺点是不能实现电路的限流保护. •电感器电流内环,电压外环: 当电感器电流用作内环反馈时,可以通过限制滤波后的电感器电流来实现逆变器的过流保护,但是这种双闭环控制具有抑制负载的能力干扰不如电容器电流是反馈的双闭环控制. 双闭环控制22将状态空间平均方法应用于逆变器的前提条件是,逆变器的输出频率远低于其开关频率,即在一个开关周期内,变频器中变量的平均值. 电路可以用来代替其瞬时值. 通过状态空间平均法处理后,可以方便地使用经典理论对受控对象进行分析和研究. 单相全桥逆变器的建模22双闭环控制23逆变器电源的负载电流io,用于其输出电压uo. 这是一个干扰单相全桥逆变器建模. 23从反馈信号Uo中减去双闭环控制电压参考信号Uref,以获得电压误差. 电压误差通过稳压器Gv(s);给出了当前循环. 从电感器电流iL的瞬时值中减去固定信号iL',iL',以获得电流环路的误差,然后通过电流调节器Gi(s)获得控制逆变器开关所需的控制信号. 电感器电流的内环和输出电压的外环的双闭环控制的系统框图. 双闭环控制. 可变电桥和随后的PWM链接可以简化为比例放大器,其放大系数为n = Ud / Um. 逆变器的双闭环控制使用电压外环PI控制,电流内环仅是P控制的电感器电流内环2. 输出电压外环双闭环控制的系统框图双闭环闭环控制变频器双闭环控制采用电压外环PI控制,电流内环仅为一个P控制,变频器输出传递函数为G(s),反映了变频器系统输出对其的跟踪性能. 给定参考电压; Z(s)反映了转换器系统的负载电流对其输出的干扰特性,该特性可等效于逆变器电源系统的输出阻抗的双闭环. 基于双闭环控制的控制系统框图PID电流滞环控制的双闭环控制系统框图PID PID PID PID PID PID PID PID PID PID PID PID PID PI D PID PID PID PID PID PID PID PID PID PID PID PID PID PID PID PID PID PID PID PID
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-208036-1.html
-

-
世人
对于马云的讲话
 支付宝商户平台登录很在研究花呗套现这个问题的时候,都在思
支付宝商户平台登录很在研究花呗套现这个问题的时候,都在思 使用计算机的免费短信方式摘要
使用计算机的免费短信方式摘要 显示面板,TN,VA,PLS,IPS,优缺点,详细说明如何选择显示器
显示面板,TN,VA,PLS,IPS,优缺点,详细说明如何选择显示器 一号通登陆_一号通登录_wife一号通
一号通登陆_一号通登录_wife一号通
还真的是