移动机器人同时定位与地图创建算法研究
电脑杂谈 发布时间:2020-04-20 12:03:11 来源:网络整理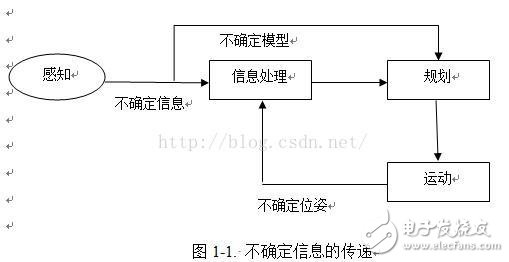
“燕山大学” 2017
王伟
【摘要】: 在当前的社会发展过程中,为了满足人类的生活需求,智能机器设备越来越受到人们的关注,例如智能移动机器人. 在移动机器人的研究中,同时定位和地图创建是机器人研究的基础. 如何使机器人快速准确地定位是该方向的核心. 本文主要提高了移动机器人同时定位和地图创建的准确性和实时性能. 主要工作如下: 首先,对移动机器人同时定位和地图创建的研究背景和意义进行了系统的概述. 分析了开发前景和所需的系统模型. 其次,针对非线性系统中扩展卡尔曼滤波器的精度差的问题,引入了线性拟合函数卡尔曼滤波器,并基于随机变量Sigma点,采用加权最小二乘算法估计了线性拟合函数,取而代之的是泰勒展开式扩展卡尔曼滤波中的高阶截断. 经过仿真验证后,该算法具有与无味卡尔曼滤波器相似的估计精度,但是大大降低了计算复杂度. 第三,对于移动机器人同时定位和地图创建的非线性和非高斯系统环境,使用不需要雅可比矩阵计算的无味卡尔曼滤波算法来递归估计机器人的姿态移动机器人地图创建,这是机器人的重要功能. 颗粒,选择保持环境特征的颗粒;为了解决采样点数量多,计算复杂度高导致采样时间长的问题,采用n维球形单纯形采样点代替了传统的Sigma点采样. 参数用于计算权重,因此,实现了采样点的良好聚合,最后引入H〜?. 滤波以提高算法的鲁棒性. 最后,在FastSLAM中进行粒子过滤的特征维护时,使用了由于粒子数量过多而导致时间浪费过多的问题,引入对称KL距离将粒子随机分为两个相等的粒子组,并计算信息距离,通过与阈值进行比较,判断下一个粒子数的增加和减少,实现自适应粒子数,可以有效降低滤波的时间复杂度. 如果满足一定的精度条件,改进的算法可以减少计算量.
[学位授予单位]: 燕山大学
[学位]: 硕士
[学位奖]: 2017
[分类号]: TP242
下载更多类似文档的全文
CAJ全文下载
(如何获取全文?欢迎使用: 购买HowNet充值卡,充值,咨询)
CAJViewer阅读器支持CAJ,PDF文件格式


[相似文献]
中文期刊全文
龚建伟,陆继联,高俊尧;移动机器人失控的安全预防措施[J];中国电机工程学报机器人; 2003-04
李波,陈慧宝,徐洁敏移动机器人地图创建,程桂森;侦察与引爆移动机器人的现状与关键技术[J];北京科技大学学报(自然科学版)机电一体化; 2004-04
付伊立,李涵,徐鹤,马玉林;轮式全向移动机器人的几种转向方法研究[J];中国电机工程学报制造自动化; 2005年第10张
王忠民,岳宏,刘继彦;移动机器人的多传感器信息融合技术综述[J];中国电机工程学报传感器技术2005-04
张小兵,宋爱国;地面移动机器人的研究现状与发展趋势[J];中国移动技术机器人技术与应用; 2005年02月
李焕全;;基于“势点”的多移动机器人协同取舍/拦截策略[J];中国电机工程学报自动化与仪器仪表; 2007-05期
郭小琴;徐刚;;具有先进功能的移动机器人跟踪与拦截控制算法[J];中国电机工程学报制造自动化; 2007-09年期间
顾新彦;;基于多传感器信息融合的移动机器人定位技术研究[J];中国电机工程学报科技信息; 2008-34期

吴玉祥;王平;;移动机器人虚拟仿真平台的设计与实现[J];中国电机工程学报计算机测量与控制; 2008-02问题
王俊德;小刚曲面上的两轮移动机器人建模与分析[J];中国电机工程学报机床和液压; 2008-05期
中国重要会议论文全文
汤亚峰;姚红杨青;;空中漂浮机器人的模糊运动控制方法[A]; 2009年中国智能自动化会议论文集(上)[C]; 2009
李斌;刘景泰孙磊王洪鹏;李宝炯;;复杂环境作业的轮滑转向转向移动机器人平台设计[A]; 2009年中国智能自动化会议论文集(第2部分)[C]; 2009
李书杰;韩胜陈宗海;;基于环境分割的移动机器人层次图[A];第十三届中国系统仿真技术及其应用年会论文集[C]; 2011
李伟;姜晓佳王彦新王永强基于模糊逻辑推理的户外移动机器人道路边缘提取方法[A]; 1995年中国智能自动化学术会议暨智能自动化委员会成立大会论文集(第一卷)C]; 1995
李宜斌;李才宏刘明周凤玉宋睿;;不确定环境中移动机器人的运动控制[A];第十九届中国控制会议论文集(二)[C]; 2000
王朝立;简贤忠丁云飞具有有限实际输入的非完整平面移动机器人的稳定[A];第二十三届中国控制会议论文集(第二部分)[C]; 2004 <
任小芳;黄玉梅移动机器人的双目立体导航[A];制造技术自动化会议论文集[C]; 2004
陈勇;戴贤忠孟正达;;多移动机器人可重构物流系统建模方法[A]; 2005年全国自动化新技术学术交流会议论文集(三)[C]; 2005

杨怡;傅梦音;孙长胜;王美玲赵成;;移动机器人跟踪控制律设计与仿真平台开发[A];第26届中国控制会议论文集[C]; 2007
任毅;陈宗海周光明基于行为的移动机器人噪声影响研究[A]; '2003系统仿真技术及其应用学术交流会论文集[C]; 2003
重要中国报纸全文
记者刘一波张文静; [N];天津日报; 2013
中国博论文全文
高健;小型履带移动机器人远程自主导航控制技术研究[D];北京工业大学2015
宗成国;变轨铰接式移动机器人技术研究[D];北京工业大学2015
王可;基于变异模型的移动机器人三维环境建模方法研究[D];北京工业大学2016
张颖;多移动机器人编队导航的双边遥操作方法研究[D];东南大学2016
刘大光;球形移动机器人运动分析与控制技术研究[D];北京邮电大学; 2009
齐海明;管内移动机器人跟踪定位技术研究[D];哈尔滨工业大学2010

徐鹤;可重构多移动模式移动机器人及其关键技术研究[D];哈尔滨工业大学2006
王海英;智能优化算法及其在移动机器人相关技术中的应用研究[D];哈尔滨科技大学; 2007
欧义;特种地面移动机器人机械系统设计与分析[D];南京科技大学2013
刘飞;室外环境下移动机器人效能优化研究[D];中国移动通信技术重庆大学2015
中文硕论文全文
韩涛;机器人状态估计算法的鲁棒性改进方法研究[D];浙江大学2015
孙丽萍;变电站带电冲洗移动机器人控制系统研究[D];山东建筑大学2015
李强;非结构化环境下移动机器人实时定位与地图创建算法研究[D];天津理工大学2015
王家佳;轮式移动机器人系统的实现与编队控制[D];西南交通大学2015
刘波;基于激光雷达的室内外巡检机器人原型设计与实现[D];西南交通大学2015
江腾光;移动机器人视觉导航与控制方法研究[D];沉阳科技大学2015
潘周;基于混合算法的移动机器人动态路径规划研究[D];上海应用技术学院; 2015
田浩;移动机器人低频无线充电技术研究[D];哈尔滨工业大学2015
刘芳;在动态未知环境中同时定位和创建移动机器人的地图[D];哈尔滨工业大学2015
王桂东;未知环境下移动机器人的实时定位与映射研究[D];安徽工程大学2015
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-182337-1.html
 上海市普陀区电子设备的销毁-不合格计算机配件的销毁处理
上海市普陀区电子设备的销毁-不合格计算机配件的销毁处理 有关电力谐波的论文的参考文献在哪里可以找到有关电力谐波的英语参考文献
有关电力谐波的论文的参考文献在哪里可以找到有关电力谐波的英语参考文献 如何为扫地机器人充电
如何为扫地机器人充电 无线激光条码采集器_seuic 条码采集器_无线条码扫描器使用
无线激光条码采集器_seuic 条码采集器_无线条码扫描器使用
有几条命