干货!移动终端室内定位导航技术对比分析
电脑杂谈 发布时间:2020-04-18 21:01:54 来源:网络整理
前言
近年来,全球室内定位技术发展迅速,各种室内定位技术也在不断发展. 但是,室内定位技术不同于室外定位技术. 目前,还没有能够解决所有室内定位环境的室内定位技术. 需求,因此室内定位技术注定会蓬勃发展.
因此,对于消费者而言,最适合他们的定位技术已成为最关注的问题. 由于不同的定位技术依赖于不同的设备并且对环境有不同的要求,因此无法全面分析所有室内定位技术.
今天我们主要要讨论几种常见的移动终端室内定位和导航技术,并对它们的优缺点和特定的适应方案进行初步分析. (本文仅分析单一定位技术,不考虑融合定位技术)
移动终端的所谓室内定位导航技术,不仅是一种可以在移动终端上显示和使用的定位系统,而且还要求系统使用某些移动终端特有的传感器或通信技术尽可能实现定位和导航. 使定位系统尽可能减少对现场硬件设备的依赖,甚至实现纯软件的室内定位过程,尽可能地促进室内定位技术的推广和应用.

尽管市场上有许多可以实现室内定位的技术,但是真正能够满足上述要求并且真正适用于移动终端的室内定位技术很少,例如蓝牙,wifi,地磁,惯性导航,计算机视觉但是,从可用性的角度来看,作者认为只有前四个: Wifi,蓝牙,地磁和惯性导航. 接下来,我们专门分析这些技术.

根据对设备的依赖程度,可以将四种定位技术大致分为两种类型. 一种类型需要在站点上部署设备,即wifi和蓝牙. 另一种不需要在现场部署设备,即地磁和惯性导航.
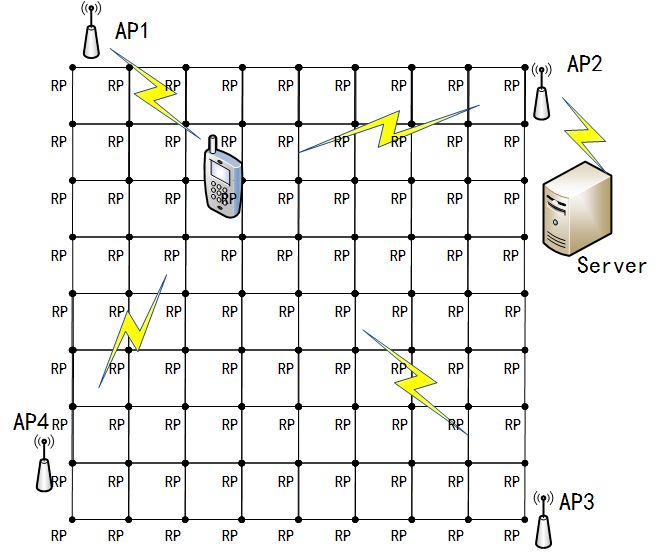
Wifi室内定位技术
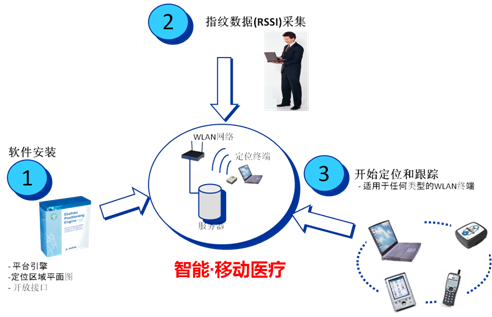
基于事先在室内部署无线AP,因为每个AP都有一个全局唯一的BSSID(MAC地址),并且通常情况下,无线AP在一段时间内不会移动,所以当移动设备打开WIFI时,请扫描转到附近的wifi信号,获取AP广播的MAC地址,然后将这些数据发送到位置服务器. 服务器获取每个AP的地理位置,并合并每个信号的强度(即场强,RSSI),计算移动设备的当前地理位置. 算法通常包括基于RSSI的三角定位和基于RSSI的指纹定位. 前者依靠移动设备同时接收到的三个以上无线AP的信号强度来进行差分计算,而后者则依靠记录大量预先确定地理位置的AP信号. 指纹的强度通过将移动设备接收到的信号强度与指纹进行比较来确定位置.
优点: 当前,无线AP设备的普及程度很高,并且在许多公共场所访问wifi热点都很方便. 因此,不需要额外的硬件即可实现室内定位. 在这种情况下,系统成本相对降低. 无线AP设备的传输距离远远大于蓝牙,并且需要部署的节点相对较少移动设备定位,适用于各种室内无线定位.
缺点: 无线AP无法保证100%的固定性. 一旦发生更改,后台数据更新将是巨大的工作量;指纹定位算法用于获取无线AP的地理位置(即指纹采集)工作量,它庞大,并且对的要求较高. 无论是三角形定位算法还是指纹定位算法,都无法达到很高的定位精度. 一般定位精度在5米以上;设备消耗高功率,必须连接到外部电源;无线信号受干扰因素很多,定位过程不稳定.
精度: 5〜15米.

场景: 适用于室内导航精度不高,稳定性不高,无线信号覆盖率高的场合,例如商业大楼.
蓝牙室内定位技术
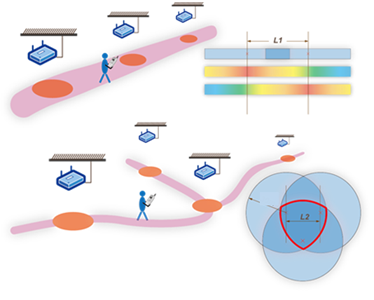
基于低功耗蓝牙技术,将蓝牙信标设备部署在室内,发送蓝牙广播数据包(包括每个蓝牙设备的唯一ID),移动终端接收蓝牙信号,并传输到地图引擎服务器以计算当前移动终端的地理位置. 蓝牙室内定位技术一般采用RSSI三角定位算法,即计算移动终端同时接收到的三个以上蓝牙信标的信号强度.
优点: 该设备体积小,功耗低,通常由电池供电,无源设备易于部署;由于设备的固定位置,定位导航过程也更加稳定. 定位精度高于wifi,精度约为2米.
缺点: 信号容易受到金属物体等的干扰. 在复杂的环境中有许多因素需要考虑;由于蓝牙传输的特性,设备的传输距离相对较短移动设备定位,部署的节点数比wifi多.
精度: 2〜3米.
场景: 诸如停车场和医院之类的准确性相对较高且用户的导航体验相对稳定的场合.
惯性导航和定位技术
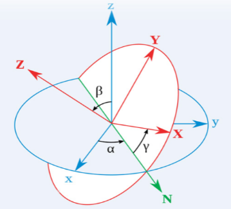
惯性导航技术是使用移动终端上集成的惯性传感器(包括加速度计和陀螺仪)来估计用于定位和导航的移动点的位置和速度. 通过积分加速度,可以知道行人的位置变化和速度变化,通过积分角速度,可以计算出行人的方向变化. 在室内定位场景中,通常使用加速度计来检测步数,然后将其与步长估计和航向估计结合起来以估计位置.
优点: 无需事先在现场部署硬件设备,也无需对室内环境有任何了解,只需观察自己的测量元素即可估算出导航参数,例如位置和速度,并且不受外部环境和其他政策的影响. 完全自主,既不发送也不接收信号,没有电磁波传播问题,也没有信号丢失问题.
缺点: 由于方向传感器(陀螺仪)的误差很大,并且随着时间的延长而累积,定位误差会随着时间的延长而迅速增加,因此需要其他设备来进行校正.
精度: 米级.

应用: 在消防救援领域,由于不需要现场部署设备,因此无法了解救援环境,而且各种无线信号也容易受到干扰,因此惯性导航技术已成为最佳选择.
地磁室内定位技术
基于移动终端上的集成磁力计,计算周围的室内地磁信号强度. 由于室内建筑结构固定了一段时间,因此室内的特殊磁场分布也固定了. 通过收集室内地磁数据,建立了一个场景地磁,并将移动终端收集到的地磁信号与进行比较,从而可以知道室内移动设备的相对位置.
优势: 无需部署额外的硬件,完全零结构,无论场景和时间如何,都无需担心设备电源,现场维护等问题;作为一种匹配的定位算法,地磁导航误差不会随时间发生累积影响.
缺点: 地磁定位技术的使用始于属物体的干扰,其稳定性值得商;. 地磁定位是一个相对位置,因此不可能仅依靠地磁定位立即获得初始位置.
精度: 2〜3米.
应用程序: 在无法部署硬件并且没有硬性要求获取初始位置的情况下. 返回搜狐,查看更多
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-180397-1.html
-

-
金真德
一国两制行不通了
-
 移动 充值卡 密码 想做网上怎么做,如今亲身经历告诉你手机在家能否刷单
移动 充值卡 密码 想做网上怎么做,如今亲身经历告诉你手机在家能否刷单 听说交行短信提醒业务收费啦——我们该如何解读和应对呢?
听说交行短信提醒业务收费啦——我们该如何解读和应对呢? 哪些植物适合室内种植?这些植物原本可以在室内种植!
哪些植物适合室内种植?这些植物原本可以在室内种植! 尽善尽美、创造精品——上海颛创电子科技
尽善尽美、创造精品——上海颛创电子科技
找你商量点事呗