轮式移动机器人运动控制的研究现状及其设计简介
电脑杂谈 发布时间:2020-04-08 10:27:04 来源:网络整理
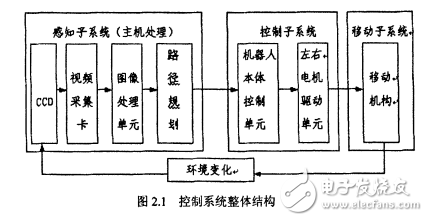
一般来讲,轮式移动机器人系统主要包括汽车的机械结构,驱动系统,传感器信息收集系统,控制系统移动机器人控制技术及其应用,移动机器人的运动学模型和路径跟踪等. 是一些简短的介绍. 在随后的章节中详细介绍. 2.移动机器人体系结构移动机器人系统要求机器人根据视觉传感器获得的信息遵循导航路径,实现机器人的自主导航运动. 本文设计了一套自主轮式移动机器进入系统. 该系统主要由感知子系统,控制子系统和移动机构三部分组成. 移动机器人控制子系统实际上是一个闭环系统. 图像传感器收集环境变化信息移动机器人控制技术及其应用,通过图像采集卡将信息传递到图像处理模块,然后在路径规划模块进行处理后将其发送到运动控制子系统. 该系统完成任务分配和协调并控制每个驱动轮的旋转. 从而实现机器人的闭环控制. 控制系统的整体结构如图2.1所示:

2.1.1移动机器人控制系统的结构移动机器人控制系统是整个机器人的核心. 他确定控制系统的性能. 目前,移动机器人控制系统具有三种主要的结构方法: 集中控制,主从控制和分布式控制. 集中控制意味着使用功能强大的计算机来实现其所有控制功能. 这种方法通常用在早期的机器人控制系统中. 随着计算机技术的飞速发展和对机器人控制要求的不断提高,主从控制和分布式控制逐渐出现. 在主从控制结构中,有两个级别的计算机. 上位计算机使用其计算能力和大量资源来完成复杂数据的处理,并将数据传递到下位计算机. 并将相关数据传递给主机. 当前使用的大多数移动机器人控制系统采用主从控制,并且还采用上,下层的分布式结构. 上位机负责整个系统的管理和操作.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-168120-1.html
-

-
白亚锋
知道要害死多少人不
 湖北师范大学王牌_武汉工程大学有自考本科吗_武汉工程大学转
湖北师范大学王牌_武汉工程大学有自考本科吗_武汉工程大学转![[iPhone6节奏大师下载] Apple iPhone6节奏大师2.5.12免费下载](http://img2.hackhome.com/newimg/20148/20148212413860854.jpg) [iPhone6节奏大师下载] Apple iPhone6节奏大师2.5.12免费下载
[iPhone6节奏大师下载] Apple iPhone6节奏大师2.5.12免费下载 将户引流到微信私域的N个方法
将户引流到微信私域的N个方法 中国移动和教育家长版下载v3.4.0 Android版
中国移动和教育家长版下载v3.4.0 Android版
现阶段美国作为一个正在衰落的超级大国他的内心是失落的