移动机器人导航研究现状及其发展趋势展望
电脑杂谈 发布时间:2019-06-29 01:03:37 来源:网络整理
加快特大型天线、卫星导航芯片、高性能多模组合导航、高精度定位、电子地图、智能位置服务、系统及终端性能测试检测预评估等一批终端设备和关键技术的开发与应用,研发新型路由交换、新型移动智能终端、新一代基站、网络安全等设备,推动信息通信设备、导航网络建设、信息网络平台等基础设施的发展与规模化应用。2011年作为中国领先的、物流以及服务等各环节成本,不断将最新的移动互联技术和智能科技转换为实际应用、智能应用和移动互联的全方位协同发展,青橙(green orange)专注于移动智能产业、高性价比的智能手机和享受到移动智能带来的精彩生活、移动智能领域等联动开发机制:生产领域。这个应用平台结合多种工业物联技术和自动化解决方案,通过智能视觉引导机器人系统、工业机器人、agv智能物流输送系统、物联应用及智能数据采集系统等,将几十种软件与硬件,高效完成无缝集成,实现全流程自动化,帮助企业打造互联互通的智能化平台,尤其适用于3c领域。

机器人通过装配的信息获取手段,获得外部环境信息,实现自我定位,判定自身状态,规划并执行下一步的动作。 2 移动机器人导航研究现状2.1 机器人导航方式移动机器人的导航方式很多,有惯性导航 [36,37]、视觉导航 [15,17,21,31]、基于传感器数据导航 [18,32,33,34],卫星导航 [14,39,40]等。它们都不同程度地适用于各种不同的环境,包括室内和室外环境,结构化环境与非结构化环境。(1) 惯性导航惯性导航是一种最基本的导航方式。它利用机器人装配的光电编码器和陀螺仪,计算机器人航程,从而推知机器人当前的位置和下一步的目的地 [37]。显而易见,随着机器人航程的增长,定位的精度就会下降,而定位误差将会无限制地增加。为减少这种误差,以及降低光电编码器等数据的噪声,Kalman 滤波器在此可有用武之地 [38]。(2) 视觉导航由于计算机视觉理论及算法的发展,视觉导航成为导航技术中的一个重要发展方向。DeSouza 等 [22]总结了近 20 年机器人导航中视觉导航技术的发展状况,包桂秋等 [17]也描述了图像技术在机器人导航中的应用,特别是在飞行器包括导弹、飞机等导航中的应用。

(2) 能准确辨认全身正常超声影像,辨认常见基本病理超声图像,识别超声伪像。进一步在模型中引入了基于图像局部信息的模糊聚类能量 从而可以获取精确的局部图像的空间特征 使得本文模型对噪声图像的聚类分割更具鲁棒性。(2)在学习算法的作用下,机器在学习过程中是无法区别局部特征和全局特征的,于是机器在完成学习后,除了学习到了数据的全局特征,也可能习得一部分局部特征,而习得的局部特征比重越多,那么新样本中不具有这些局部特征但具有所有全局特征的样本也越多,于是机器无法正确识别符合概念定义的“正确”样本的几率也会上升,也就是所谓的“泛化性”变差,这是过拟合会造成的最大问题.。
(4) 卫星导航GPS 全球定位系统是以距离作为基本的观测量,通过对四颗 GPS 卫星同时进行伪距离测量计算出用户(接收机)的位置。机器人通过安装卫星信号接收装置,可以实现自身定位,无论其在室内还是在室外。宋爱国等 [14]利用 GPS 结合数字地形图,对机器人在野外环境中的导航问题作了研究。Lim 等 [39]先利用GPS 信号对野外环境中的机器人进行粗定位,然后利用全景图像数据精确定位机器人。Panzieri 等 [41]用 Kalman 滤波器融合 GPS 定位数据和其他定位数据移动机器人的发展现状及趋势,发展了一个室外环境下的机器人导航系统。有趣的是,仿照 GPS 的工作原理,Hada 等 [39]利用分布在室内各处的摄像机,研制了一个室内 GPS 系统(iGPS)。2.2 机器人导航相关技术机器人导航相关技术包括机器人定位与地图构建 [8,12,20]、机器人路径规划[1,2,10,27]、机器人体系结构 [41]、传感器数据融合 [42,43]等。这些方面的研究内容及近些年所取得的进展,可以参考这里指出的文献,本文不再赘述。2.3 智能方法的应用随着智能控制理论与方法的迅速发展,智能方法在移动机器人导航中得到了广泛应用。

然而使得新编码标准产生划时代提高的主要方法通常是增加编码一帧图像或者一个像素块时所支持的模式种类,主要包括更高精度的运动矢量、在选择图像顺序时更高的灵活性、更多的帧内预测模式、更多的运动矢量预测、支持更多的变换块的尺寸以及运动补偿预测时更多种类的块形状。mapbox 不同于传统栅格地图,采用矢量瓦片与技术,这种新颖的数据格式,是将矢量要素按规则格网切割而形成的瓦片数据,便于算法分块降低信息传输成本。第1章 绪论第2章 信源第3章 无损压缩编码理论基础第4章 熵编码——分组编码第5章 熵编码——算术编码第6章 通用信源编码第7章 有损压缩理论基础第8章 标量量化第9章 矢量量化第10章 预测编码第11章 变换编码第12章 子带编码第13章 小波变换编码第14章 分布信源编码。
龚涛等 [19]分析了未知远程环境下移动机器人导航过程中进化学习的效率和知识更新问题,提出了并行进化模型来解决此问题。(3) 神经网络技术Banta 等 [30]讨论了神经网络技术在机器人导航中的应用。Morasso [22]构建了一个基于自组织神经网络的混杂系统来实现机器人导航,通过传感器数据训练自组织神经网络,机器人关于环境的知识便逐步积累。Chee 等 [24]构造了一个两层的模糊推理系统来进行机器人导航,此系统接收传感器数据作为输入,而直接输出机器人控制信号。Doitsidis etal[25]设计了一个两层的模糊推理系统来实现自动小车的导航;其中第一层实现数据融合和运动控制功能,第二层实现实时避障功能。Tsourveloudis 等 [27]使用一个两层模糊推理系统,结合势场方法,实现机器人导航。这里的模糊推理系统与 [26]大致相同。(4) 基于行为的导航方式有一类机器人导航方法是基于行为的导航方式。所谓基于行为的导航是把复杂的导航功能分解成很多简单的功能模块单元。每个单元有自己的感知器和执行器移动机器人的发展现状及趋势,具有特定的感知动作行为。机器人在不同的情景下,激发并执行某个或某些功能模块单元。
触摸屏类型 电容屏,多点触控主屏尺寸 4.7英寸主屏材质 tft主屏分辨率 800x480像素屏幕像素密度 199ppi网络网络类型 双卡双模网络模式 移动3g(td-scdma),联通2g/移动2g(gsm)支持频段 2g:gsm 850/900/1800/1900 3g:td-scdma 1880/2010mhzwlan功能 wifi,ieee 802.11 n/b/g导航 gps导航,a-gps技术连接与共享 dlna,wlan热点,蓝牙3.0硬件操作系统 android os 4.1核心数 四核cpu频率 1228mhzram容量 1gbrom容量 4gb存储卡 microsd卡,支持app2sd功能扩展容量 64gb电池类型 可拆卸式电池电池容量 2000mah 内置类型 双(前后)后置像素 500万像素前置像素 30万像素传感器类型 cmos闪光灯 led补光灯视频拍摄 支持拍照功能 连拍,滤镜,场景模式,自动对焦外观造型设计 直板机身颜色 白色,银色手机尺寸 133.3x70.7x9.65mm手机重量 143.9g操作类型 物理按键感应器类型 重力感应器,光线传感器,距离传感器sim卡类型 micro sim卡机身接口 3.5mm耳机接口,micro usb v2.0数据接口此文是否有帮助:。详细功能:一、系统前台功能特色功能:仿58同城强大的产品相册上传功能,产品放大功能,产品相册功能1、菜单导航模块划分合理的导航模块使浏览者快速地查找自己需要的产品信息,提高商品购买率。gps导航:支持a-gps 网络辅助导航功能 电子地图:支持下载 内置gps导航:支持 持a-gps:支持 加速传感器:支持 距离传感器:支持 光线传感器:支持 地磁传感器:支持 三轴陀螺仪:支持。
梅涛老师认为我们需要考虑建立发展安防机器人的长效机制,安防机器人的研究重点,十大技术热点:导航定位,计算机视觉,目标跟踪,移动与运动控制,检查/巡检,算法,目标检测与识别,传感器,网络,人-机器人交互。3.机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行决策控制。4.机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。
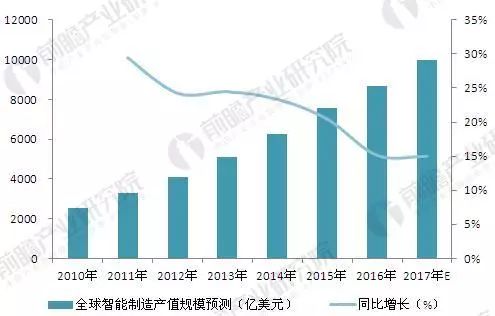
发布会上展示了几个智能新产品:智能耳机、配送机器人“万小饿”等,以后骑手只要戴上耳机,使用语音就可以向app下达接单、导航、拨打用户电话等指令,机器人送餐的普及应用或许也指日可待了。2021年前,依托主导产业建链补链强链延链工程,建设全球领先的智能制造应用基地、示范基地和创新基地,打造世界级的企业工业互联网平台,完善智能制造公共服务基础,构建智能制造人才高地,支撑5000亿国家级园区建设。加快特大型天线、卫星导航芯片、高性能多模组合导航、高精度定位、电子地图、智能位置服务、系统及终端性能测试检测预评估等一批终端设备和关键技术的开发与应用,研发新型路由交换、新型移动智能终端、新一代基站、网络安全等设备,推动信息通信设备、导航网络建设、信息网络平台等基础设施的发展与规模化应用。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-109141-1.html
-

-
赵倩文
我担心的
-
龚鹏耀
投资讲的好
 特变电工的“流行病” |新能源“双端”能源管理系统,收益可以增加28%!
特变电工的“流行病” |新能源“双端”能源管理系统,收益可以增加28%! 2020年,哪些创业项目在农村地区最赚钱?这些方面可以进行调查和理解
2020年,哪些创业项目在农村地区最赚钱?这些方面可以进行调查和理解 成熟的解决方案:VGA接口的详细解释和应用
成熟的解决方案:VGA接口的详细解释和应用 整套解决方案:如何拆分台式计算机的屏幕,教您如何连接台式机双显示器
整套解决方案:如何拆分台式计算机的屏幕,教您如何连接台式机双显示器
我们这些老家伙积累点钱防老