基于分步的位置指纹定位算法研究(2)
电脑杂谈 发布时间:2019-06-02 03:14:37 来源:网络整理由于受其它环境因素的影响 [14 -15] ,信号强度并不稳定,为了克服信号强度不稳定对定位的影响,减小实验误差,通常在每个参考点多次测量取平均值,每个数据点测量 100 次。获得数据后,首先建立粗粒度,然后根据各点的归属,在粗粒度点下建立细粒度,数据点存储格式为(x i ,y i ,RSS I 1 ,RSS I 2 ,RSS I 3 ,RSS I 4 ),RSS I i 表示接收到的第 i 个标签的信号强度值,例如标号为 5 的位置点存储格式为 (0. 3,0. 3,- 65,-71,-60,-69)。(2)定位阶段。阅读器的位置代表未知点的位置,在未知点处依次读取到标签1、标签2、标签3、标签 4 的信号强度,接下来进行算法的实现和对比分析。基于分步的位置指纹定位算法测得未知点处的各个标签信号强度之后,先和粗粒度点 1、2、3、4 进行匹配性分析。LANDMARC 定位算法仅需要与第(1)阶段建立的所有指纹点即 1 ~20 进行匹配性分析。基于分步的位置指纹定位算法和 LANDMARC 定位算法选用加权 K 近邻算法,K 取值为 4。采用图 7 所示的基于分步的位置指纹定位 GUI 界面,完成分步的位置指纹定位算法和 LANDMARC 定位算法效率的对比与分析,其中根据定位所需的时间长短对效率对比进行评价[16] 。
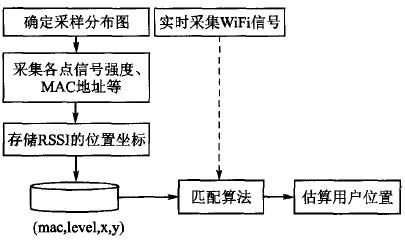
图 7 基于分步的位置指纹定位 GUI 界面3. 3 实验结果及分析表 1 是离线训练阶段建立的,其中 1、2、3、4 号位置点为粗粒度中心,每个粗粒度中心包括多个细粒度的数据点,例如 1 号粗粒度中心包括 5、6、9、10共 4 个细粒度数据点。同理,由实验布置图可知其余的粗粒度中心及其包括的细粒度点。表 1 训练阶段建立的点 位置 标签 1 标签 2 标签 3 标签 41 0. 9,0. 9 -55. 847 8 -83. 912 1 -76. 393 8 -72. 725 42 2. 7,0. 9 -84. 555 6 -67. 467 8 -83. 148 1 -83. 257 13 0. 9,2. 7 -75. 510 1 -84. 185 8 -58. 950 8 -75. 842 64 2. 7,2. 7 -81. 161 5 -84. 819 1 -80. 547 8 -54. 027 05 0. 3,0. 3 -77. 971 2 -82. 336 6 -75. 508 2 -81. 914 36 1. 5,0. 3 -78. 955 0 -82. 277 8 -79. 054 7 -77. 831 07 2. 1,0. 3 -79. 451 3 -78. 617 9 -79. 984 1 -83. 119 78 3. 3,0. 3 -77. 659 3 -76. 676 8 -71. 702 1 -83. 342 69 0. 3,1. 5 -65. 067 7 -79. 697 7 -78. 239 4 -74. 631 310 1. 5,1. 5 -63. 691 1 -86. 085 1 -80. 757 6 -80. 006 711 2. 1,1. 5 -80. 161 9 -76. 492 2 -80. 992 5 -80. 591 512 3. 3,1. 5 -79. 289 9 -77. 798 0 -79. 872 5 -79. 920 413 0. 3,2. 1 -82. 164 7 -83. 701 4 -81. 250 2 -75. 652 414 1. 5,2. 1 -73. 507 5 -85. 333 3 -78. 666 7 -82. 296 815 2. 1,2. 1 -81. 238 1 -84. 909 1 -74. 418 9 -73. 664 616 3. 3,2. 1 -72. 812 5 -81. 416 7 -84. 326 9 -80. 166 717 0. 3,3. 3 -77. 303 6 -85. 175 7 -74. 646 2 -72. 641 118 1. 5,3. 3 -80. 262 8 -81. 223 8 -72. 429 4 -73. 051 519 2. 1,3. 3 -84. 340 4 -85. 909 1 -74. 117 0 -74. 346 720 3. 3,3. 3 -82. 774 5 -85. 238 1 -76. 247 9 -69. 638 5实验中阅读器的位置代表未知点的位置,依次将阅读器放在实验布置图中的 21、22、23、24 位置,多次测量求出其平均值。
⑵工程建筑物定位和主轴线控制网的测设:①依据规划勘测部门及建设单位提供的坐标控制点、施工平面图等资料,进行实地踏勘,包括施测路线、采用的计算公式、测设精度、所需测量等,随后进行建筑物的角点、主轴线的定位,并记录下现场测设的原始数据、图表。三、方法和步骤一、计算测设数据如图所示,a、b为已知平面控制点,其坐标分别为a(xa,ya)、b(xb,yb),p点为建筑物的一个角点,其坐标为p(xp,yp),现根据a、b两点,用极坐标法测设p点,其测设数据计算如下:(1)计算ab边的坐标方位角αab,和ap边的坐标方位角αap。本实用新型提供异站交会照像测绘仪,其属于精度较高的异站操作测绘,其单台仪器只需一个照像机,只需要在每个测站测量时,对知道或能求到摄影中心坐标的摄影设备的主光轴的方位角和倾角进行测定,并对测区进行摄影,即完成外业工作,可在不同位置对同一区域照像,就按申请日为2013年8月i日申请号为201310344844.3题为《摄影中心到目标实物点的方位角的测量方法及运算设备》的专利申请内容的原理,在内业中继续用两张像片去求得两个摄影中心分别到同一待测物的方位角,用该两摄影中心坐标和该两方位角前方交会求得该待测物坐标,按该方式求待测物坐标,无需在像平面单独建立坐标系,而且可以跟据需要只求待测物坐标,无需一定要将其三维的位置一起(及连同高程一起)求出,并且求测该坐标时,只需要两摄影中心坐标、两摄影中心分别到该待测物的方位角作为主要数据,求测需用的因素少,运算简单化,且其解算方式或原理是类同极为普遍的全站仪测量模式,普通测绘技术人员原易懂,易掌握,易发现和解决作业过程中的错误或误差,且不需要高级的应用数据处理软件和运算设备,具有技术门坎低,成本和推广效率的优势,利于照像测绘的迅速推广,在实施例中,异测站操作时,需要较多地搬动测站,设立每个测站又要经过对中和整平操作,对中和整平操作需反复调试,浪费较多时间,寻求只需要整平操作不需进行对中操作的照像测绘仪对提高测量工作效率十分重要,通过该实施例,可以省略对中操作和反复整平、对中的过程,只需整平后用其它仪器对测站坐标、高程进行测量并定向操作后即可进行照像测量,工作效率能得到极大提高,通过其能求测摄影中心到像点所对应的实物点的方位角或垂直角。
表 4 为基于分步的位置指纹定位算法与 LAND-MARC 定位算法的定位结果对比,包括定位所需的时间及其定位精度。表 4 实验定位结果点 实际位置 方法 测得位置 所需时间 误差21 0. 6,3. 0LANDMARC 1. 042 7,2. 988 0 0. 547 0. 443位置指纹 1. 785 5,2. 282 9 0. 317 1. 38522 1. 2,1. 2LANDMARC 0. 737 4,0. 916 3 0. 498 0. 543位置指纹 1. 712 4,0. 917 7 0. 327 0. 58523 2. 4,1. 2LANDMARC 2. 648 7,1. 234 3 0. 474 0. 251位置指纹 2. 515 0,1. 209 0 0. 287 0. 11524 1. 2,2. 1LANDMARC 0. 762 5,2. 796 8 0. 509 0. 823位置指纹 1. 156 6,1. 244 9 0. 266 0. 856根据表 4 可知,基于分步的位置指纹定位算法在保证定位精度与 LANDMARC 定位算法的定位精度相当的基础上,提高了定位效率。
滑动指纹图像配准目前常用的算法有基于像素灰度相关性的算法,基于傅。基于加博函数的指纹增强算法及其应用田.软件学报,。指纹识别系统关键算法包含四个主要功能模块:采集指纹图像、指纹图像 预处理、指纹特征提取和指纹匹配。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/tongxinshuyu/article-103039-2.html
 绿色互联网|湖南移动绿色网潇湘APP为青少年搭建了“防火墙”
绿色互联网|湖南移动绿色网潇湘APP为青少年搭建了“防火墙” “王者荣耀”按钮模拟攻略轻松闪烁!
“王者荣耀”按钮模拟攻略轻松闪烁! 吉林移动网上营业厅话费查询:欢迎加征网
吉林移动网上营业厅话费查询:欢迎加征网 掌声响天下-庆祝汉中建国70周年系列文化活动的预览
掌声响天下-庆祝汉中建国70周年系列文化活动的预览
都是骗