第一章GPS系统及信号习题 〈习题1〉 简述GPS定位系统的
电脑杂谈 发布时间:2019-05-06 06:18:56 来源:网络整理
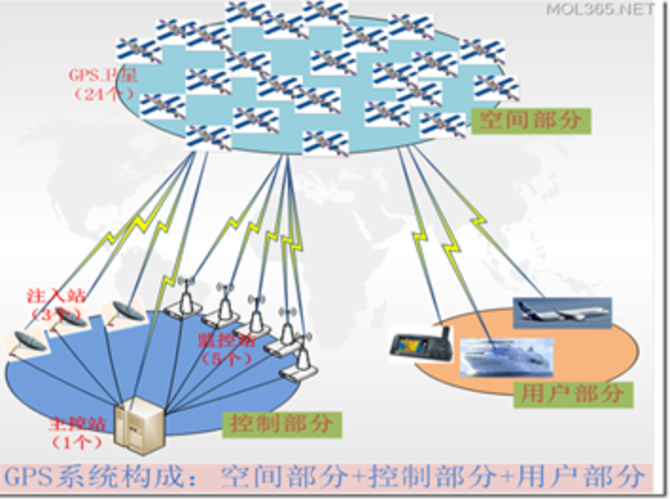
第一章 GPS 系统及信号习题 〈习题 1〉 简述 GPS 定位系统的构成, 井说明各部分的作用。gps系统结构分析 〈习题 2〉 简述 GPS 卫星在轨道上运动所受的力。 〈习题 3〉 简述 GPS 在轨道上运动的开普勒三定理。gps系统结构分析 〈习题 4〉 画图并解释开普勒轨道 6 参数的几何从物理意义。 〈习题 5〉 地球引力场摄动力对卫星的运动有哪些影响? 〈习题 6〉 日、 月引力对卫星的运动有哪些影响? 〈习题 7〉 什么是广播星历? 什么是精密星历?两者的区别是什么? 〈习题 8〉 简述码、 码元、 数码率、 信号调制、 信号解调及自相关系数的概念。 〈习题 9〉 说明 C/ A 码及 P 码的产生过程及其特点。〈习题 10〉 简述伪随机噪声码测距原理及裁波相位测量原理。 〈习题 11〉 简述卫星导航电文的内容, 并解释数据龄期、遥测码、时延差改正及传输参数〈习题 12〉 GPS 信号接收机的软件和硬件包括哪些内容? 并说明各自 的作用。〈习题 13〉 简述 GPS 信号接收机的分类。〈习题 14〉 试述 GPS 星座的构成与功能特点。

北斗二号和北斗三号卫星导航系统在国际首次实现了采用卫星测定业务和卫星导航业务相结合的集成体制方式来为用户导航定位。因质点速度方向不变化,始终是向前运动,最 终匀速运动,所以位移一直在增大,c 项和 d 项均错误. 答案 b时间:60 分钟1.关于质点,下列说法中正确的是 a.质点一定是体积和质量极小的物体 b.因为质点没有大小,所以与几何中的点没有区别().c.研究运动员在 3 000 米长跑比赛中运动的快慢时,该运动员可看做质点 d.欣赏芭蕾舞表演者的精彩表演时,可以把芭蕾舞表演者看做质点 答案 c2.北京时间 2012 年 2 月 25 日凌晨 0 时 12 分,中国在西昌卫星发射中心用“长 征三号丙”运载火箭, 将第十一颗北斗导航卫星成功送入太空预定轨道. 这标 志着我国在北斗卫星导航系统建设上又迈出了坚实的一步, 北斗卫星导航系统可以免费提供定位、测速和授时服务,定位精度 10 m,测速精度 0.2 m/s,以 下说法不正确的是 a.北斗导航卫星定位提供的是被测物体的位移 b.北斗导航卫星定位提供的是被测物体的位置 c.北斗导航卫星授时服务提供的是时刻 d.北斗导航卫星测速服务提供的是运动物体的速率 解析 由位臵、位移、时间、时刻和速度的定义可知,北斗导航卫星定位提供 ( ).的是一个点,是位臵,而不是位臵的变化,故选项 a 错误,b 正确。单频噪声:单频噪声是一种连续波的干扰(如外台信号),它可视为一个已调正弦波,但其幅度、频率或相位是事先不能预知的。
②GPS 信号的两个载波, 两个伪噪声码和导航电文, 为运动载体的多参数和广用途测量, 提供了丰富的数据载体。③GPS 卫星所发送的导航定位信号, 是一种可供无数用户共享的空间信息资源, 为陆地、 海洋和空间广大用户提供高精度多用途的导航定位服务。④可以接受地面主控站发送卫星的调度命令。⑤GPS 的技术能够达到毫米级的静态定位精度和厘米级的动态测量精度。⑥飞越注入站上空时, 接受由地面站用 S 波段(10 厘米波段) 发送到卫星的导航电文和其他相关信息。 习题二参考答案: GPS 卫星在运动过程中所受的力主要包括: 1、 地球引力;2、 地球体的非球性及其质量分布不均匀而引起的作用力, 即地球的非中心引力; 3、 太阳光的直接与间接辐射压力; 4、 大气的阻力; 5、 地球潮汐的作用力(包括海洋潮汐和地球固体潮引起的作用力); 6、 磁力及其他作用力等。 习题三参考答案: 1、 开普勒第一定律: 卫星运动的轨道是一个椭圆, 而该椭圆的一个焦点与地球的质心相重合。 2、 开普勒第二定律: 卫星在过地球质心的平面内运动, 其向径在相同的时间内所扫过的面积相等。 3、 开普勒第三定律: 卫星运行周期的平方, 与轨道椭圆长半径的立方之比为一常量,而该常量等于地球引力常数 GM 的倒数。
习题四参考答案: as: 轨道椭圆的长半轴 es: 轨道椭圆的偏心率 以上两个参数确定了 开普勒椭圆的大小, 称之为轨道椭圆形状参数。 : 升交点的赤经, 即在地球赤道平面上, 升交点与春风点之间的地心夹角(升交点:即当卫星由南向北运动时轨道与地球赤道面的一个交点。 I: 轨道面的倾角, 即卫星轨道平面与地球赤道面之间的夹角。 以上两参数, 唯一地确定了卫星轨道平面与地球体之间的相对位置与地球体之间的相对定位, 称之为轨道平面定向参数。 s: 近地点角距, 升交点与近地点之间地心夹角. fs: 真近点角, 确定任意时刻卫星在轨道上位置 该参数为时间的函数, 它确定了卫星在轨道上的瞬时位置。 习题五参考答案: 地球引力场对卫星运动轨道的影响主要表现为: 1、 引起运动轨道平面在空间旋转, 使升交点赤径产生周期性变化。 2、 引起近地点在轨道平面内旋转, 导致近升交距的变化。 3、 引起平近点角的变化。 习题六参考答案:日、 月引力引起了卫星位置摄动, 主要表现为一种长周期摄动, 它们作用在 GPS 卫星上的加速度约为 5×10-6(m/s2) , 如果忽略该项的影响, 将造成径向、 法向和切向上产生 50~150m 的位置误差。
习题七参考答案: 预报(广播) 星历--监控数据时间序列外推估注入的轨道参数; 精密星历--全球 GPS 跟踪网站监测数据计算的轨道参数 区别: GPS 卫星的预报星历是根据跟踪站前一段时间的观测资料, 外推的参考轨道参数,并加入轨道的摄动改正后得到的外推星历。而精密星历是根据地面跟踪站所获得的精密观测资料计算而得的星历, 它是不包括外推误差的实测星历, 可为用户提供观测时刻的卫星精密星历, 但此种星历用户无法实时通过卫星信号而获得, 只能在事后通过电传、 磁盘、 网络等通讯媒体向用户传递, 并且它是一种有偿服务。 习题八参考答案: 码: 信息的二进制数及其组合 码元: 1 位二进制数(比特) 数码率: 在二进制的数字化信息传输中, 每秒钟所传输的比特数, 用以表示数字化信息的传输速度。 信号调制: 即为了有效的传播信号而将原低频信号(调制信号) 加载到高频的载波上的过程即为信号调制。 信号解调: 从接收到的调制波中分离出测距码信号、导航电文信号以及纯净的载波信号,即为信号的解调。 自相关性 -结构相同的随机码序列 u(t) ~u(t) 通过平移码元数, 相应的码元相互对齐。
北斗二号和北斗三号卫星导航系统在国际首次实现了采用卫星测定业务和卫星导航业务相结合的集成体制方式来为用户导航定位。本书专从电子工程和通信技术的角度详细讲解gps和北斗双系统接收机的原理,在对gps和北斗系统的历史演进进行介绍的同时,详细讲解了gps和北斗接收机内部从信号跟踪与捕获,到卫星位置速度计算、观测量模型分析和定位导航解算的几乎所有信号处理理论,同时也融进了作者在该领域多年的研发经验和心得。择一组最佳的参考站(如参考站a、b、c),利用它 2.4 vrs服务们的观测数据在用户位置附近模拟出一个虚拟站 vrs是全球导航卫星系统的增强技术,可以v(即单点定位点),模拟虚拟参考站卫星信号观测 提供高精度的位置服务、时空基准服务、卫星轨道值,并将模拟观测值实时发送给用户,整体地改正 修正服务、源数据服务以及气象等延伸服务。
采用精密单点定位时,首先要根据分布在全球的若干基准站的数据进行精密卫星轨道参数和卫星钟差的计算,再根据计算结果对单台接收机采集的非差相位数据进行处理,最终确定测站的精确坐标。要计算相位噪声对snr的影响,考虑一下时钟时延等效于给定频率下的相位延迟。北斗网络时钟产品采用精准的测频与智能驯服算法,使装置守时单元输出的时间频率信号与gps卫星/北斗卫星/外部b码时间基准保持精密同步。

天线单元主要功能: 是对经过放大和变频处理的信号电源进行跟踪、 处理和测量。 软件: 1 数据采集软件 2 基线处理软件(随机处理软件) 3 网平差软件(后处理软件)4 设备参数设置与断诊软件 软件作用: 简言之, 就是用来处理信息数据。 如: 网平差计算、 基线处理等数据的计算。 习题十三参考答案: 1. GPS 接收机原理与结构 NovAtel JAVAD 2. GPS 接收机分类 (1) 用途分类: 导航型 测量型 授时型 (2) 接收信号分类: 码相位接收机 C/A、 P=测距码接收机 载波相位接收机 单频接收机 L1 双频接收机 L1\L2 信标接收机 WASS (3) 卫星系统分类: 单星系统 GPS 接收机 GLONASS 接收机 双星系统 GPS+GLONASS 接收机 多星系统 PS+GLONASS+EGNOS…接收机 (4) 作业模式分类: 静态接收机 动态接收机 (5) 结构分类: 分布式接收机(接收机\天线\控制器\电台\电源…) (接收机+天线\控制器\电台\电源…) (接收机+控制器\天线\电台\电源…) 整体式接收机 (接收机、 天线一体化) (接收机、 天线、 控制器、 电源…一体化) (接收机、 天线、 控制器、 电台、 电源…一体化) 手持式接收机 (6) 原理分类: 1) 码相关技术接收机----第一代(L1 载波) WILDWM101/2 2) 完全平方技术接收机----(L2 半波) 3) 混合型接收机----第二代(L1 载波、 L2 半波) Trimble4000SST 4) C/A+P 码接收机----(L1、 L2 载波+ L2 半波) WILDGPS-System200 AshtechM12 5) 双 P 码接收机----(L1+P、 L2+P 载波) AshtechP-12 6) 相关技术接收机----(Ry1==>L1、 Ry2==>L2) 7) 窄距相关技术接收机----(Ry1==>L1、 Ry2==>L2) 第三代 C/AP(Y) NovtAelOutrider 8) Z 跟踪技术接收机----(Y==> P+W) LeicaSR399 AshtechZ-12 9) 多星技术接收机----(GPS+GLONASS+EGNOS…) DSNPGNSS 10) 共同跟踪技术接收机----第四代(GPS+GLONASS+INMARSAT+WAAS…) JAVAD 11) 开放接收机----OpenGPS SPECTRAGeotracer+Geodimeter LeicaGPS5001. GPS 接收机原理与结构 NovAtel JAVAD 2. GPS 接收机分类 (1) 用途分类: 导航型 测量型 授时型 (2) 接收信号分类: 码相位接收机 C/A、 P=测距码接收机 载波相位接收机 单频接收机 L1 双频接收机 L1\L2 信标接收机 WASS (3) 卫星系统分类: 单星系统 GPS 接收机 GLONASS 接收机 双星系统 GPS+GLONASS 接收机 多星系统 PS+GLONASS+EGNOS…接收机 (4) 作业模式分类: 静态接收机 动态接收机 (5) 结构分类: 分布式接收机(接收机\天线\控制器\电台\电源…) (接收机+天线\控制器\电台\电源…) (接收机+控制器\天线\电台\电源…) 整体式接收机 (接收机、 天线一体化) (接收机、 天线、 控制器、 电源…一体化) (接收机、 天线、 控制器、 电台、 电源…一体化) 手持式接收机 (6) 原理分类: 1) 码相关技术接收机----第一代(L1 载波) WILDWM101/2 2) 完全平方技术接收机----(L2 半波) 3) 混合型接收机----第二代(L1 载波、 L2 半波) Trimble4000SST 4) C/A+P 码接收机----(L1、 L2 载波+ L2 半波) WILDGPS-System200AshtechM12 5) 双 P 码接收机----(L1+P、 L2+P 载波) AshtechP-12 6) 相关技术接收机----(Ry1==>L1、 Ry2==>L2) 7) 窄距相关技术接收机----(Ry1==>L1、 Ry2==>L2) 第三代 C/AP(Y) NovtAelOutrider 8) Z 跟踪技术接收机----(Y==> P+W) LeicaSR399 AshtechZ-12 9) 多星技术接收机----(GPS+GLONASS+EGNOS…) DSNPGNSS 10) 共同跟踪技术接收机----第四代(GPS+GLONASS+INMARSAT+WAAS…) JAVAD 11) 开放接收机----OpenGPS SPECTRAGeotracer+Geodimeter LeicaGPS500 习题十四参考答案: (1) 构成: GPS 工作星座于 1994 年 3 月建成, 其信号覆盖率达到 98%。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-96625-1.html
-

-
崔珪
烊烊最后那一笑好迷人啊
 尼康35 1.4G和28 1.8G在D600机身上各光圈的表现(娱乐测试贴)
尼康35 1.4G和28 1.8G在D600机身上各光圈的表现(娱乐测试贴) 4k对准检测工具下载1.75中文免费版
4k对准检测工具下载1.75中文免费版 陶瓷天线的原理是什么?
陶瓷天线的原理是什么?![[韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?](http://img1.cache.netease.com/catchpic/D/D0/D000A6FECE1D12FC25474DCFD969A13C.jpg) [韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?
[韩寒]中国为什么不敢将“龙腾龙”发送给“搜索”马来西亚航空?
垃圾