北斗卫星导航接收机跟踪环技术设计与实现(3)
电脑杂谈 发布时间:2019-04-30 01:14:59 来源:网络整理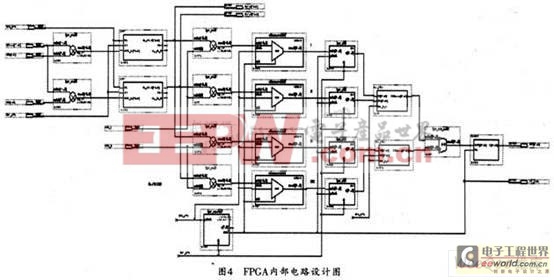
接收机组合跟踪环路原理如图3所示。图 3 单通道接收机组合跟踪环路原理图Fig.3Sketchmap ofthecombinedPLLandDLLtracking loop组合跟踪环路对接收卫星信号的处理过程如下:输入信号 sIF ( n )进入跟踪环路后,分为同相( I9 5光 学 与 光 电 技 术 第14卷支路)和正交( Q 支路)两路信号,两路信号分别与载波环产生的本地载波混频相乘,随后将两路混频结果分别与码环产生的超前( E )、即时(P )、滞后( L )三路本地伪码做相关运算。相关运算的结果经积分清除器后 得到 六 路相干 积分值 I E 、I P 、 I L 、 Q E 、 Q P 和 Q L ,将 I P 和 Q P 作为载波环鉴别器的输入,其他项作为码环鉴别器的输入,从而得到两个鉴别器的结果 e 和 δ CP ,并对两者进行滤波,用 滤 波 后 的 结 果 作 为 载 波 环 NCO 和 码 环NCO的输入来调节本地载波和伪码的相位和频率,从而使本地载波、伪码分别和接收载波、伪码的相位和频率保持一致,以确保下一时刻接收卫星信号中的载波和伪码仍被剥离。
在环路运行时,载波环和码环分别依据所产生本地载波和伪码的状态输出各种测量值。同时,在实现稳定跟踪的基础上,载波环鉴别器还可以解调出卫星的导航电文。3.2 载波环设计载波环的作用是尽力保持产生的本地载波信号的频率、相位与接收载波信号的相一致,从而保证通过混频来剥离卫星信号载波的机制可以实现。上文已提到载波环有PLL和FLL两种实现方式。这两种方式中,前者具有较窄的噪声带宽,能实现对信号的紧密跟踪,并且能够输出精确的载波相位测量值,但是其对弱信号的跟踪能力较差,容忍动态应力的能力也弱;而后者具有较宽的噪声带宽,其容忍动态应力的能力比锁相环强,对弱信号也有较强的跟踪能力,但是它对信号的跟踪不紧密,由它输出的载波相位测量值精度也稍差 [7 ] 。为了提高环路的跟踪能力和测量值的输出精度,设计中载波环滤波器结构采用2阶 FLL 辅助的3阶 PLL的形式,其实现原理如图4所示。图 4 二阶锁频环辅助三阶锁相环结构框图Fig.4Sketchmap ofsecondorderFLL - assisted - PLL 当锁相环得到某时刻的 I P ( t)和Q P ( t )数据对后,可运用二象限反正切函数鉴相器和三角函数得到相位差异 e 为 e =arctanI pQ ( )p此相位差在输入误差范围的±90°区间上保持线性特性,且输出相位误差不受信号幅度影响,经过环路滤波器后输入载波 NCO ,从而调整输出信号的相位,使相位误差逐渐减小直至趋近于零,而此时压控振荡器的输出信号的频率就是所需要提取的载波频率。

3.3 码环设计码环的主要功能是产生三路本地码,并保持本地伪码( P 支路码)与接收伪码之间的相位一致,从而 得到 接 收 信 号 的 码 相 位 及 其 伪 距 测 量值。码环 主 要 通 过 延 迟 锁 定 环 路 (Delay LockLoop , DLL )来实现,码环跟踪算法采用非相干超前减滞后幅值法实现相位鉴别, DLL相关间隔为12 码片间隔,根据非相干积分值E 、 P 、 L 采样点值估算码相位差 δcp ,其计算公式为δcp= 12E - LE + L ,其中, E =I E 2 + Q E槡2 、L = I L 2 + Q L槡2 。本 设 计0 6第4期 查环 等:北斗卫星导航接收机跟踪环技术设计与实现中,码环滤波器的结构为二阶环路滤波器,如图5所示。图5接收机码环结构Fig.5StructureofreceiverDLL4 系统测试4.1 硬件平台设计按照软件的设计思想,本设计中北斗导航接收机的数据处理平台采用 DSP+FPGA 的架构, FPGA 选 用Altera 公 司 的 CycloneV 系 列 的5CEFA9F31I7N 芯 片, DSP 选 用 TI 公 司 的TMS320C6713B芯片。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-95096-3.html
 wiiu模拟器cemu_wiiu模拟器配置要求_wiiu模拟器cemu最新版
wiiu模拟器cemu_wiiu模拟器配置要求_wiiu模拟器cemu最新版 尼康SB | 600的报价,参数,图片|尼康SB | 600太平洋提供3G版本
尼康SB | 600的报价,参数,图片|尼康SB | 600太平洋提供3G版本 dat文件是什么格式 ug二次开发|UG二次开发教程
dat文件是什么格式 ug二次开发|UG二次开发教程 为购买索尼A7RIII微型单机报价15788买好礼物
为购买索尼A7RIII微型单机报价15788买好礼物
重则军警压制罪犯