wb790238030的博客
电脑杂谈 发布时间:2020-06-05 23:21:56 来源:网络整理
Ka Xiaoji的博客
07-25

20,000 +
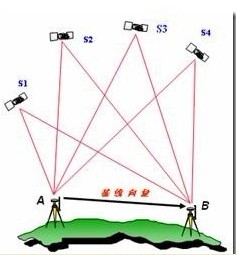
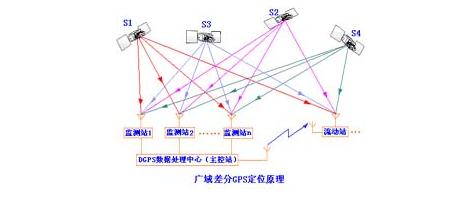
GNSS原理与技术(3)-差分定位技术
本文以DGPS为例来说明差分定位技术. 首先,我们提出一个问题: 为什么要使用差分GPS定位技术进行测量?答案是: 绝对定位精度不能满足要求. 1. DGPS简介DGPS: 差分全球定位系统(Differential Global Position System). 目前,GPS系统提供的定位精度优于10米,为了获得更高的定位精度,我们通常采用差分GPS技术: GPS ...
国庆博客
03-14
1487
无人机与船上通信协议——MAVLink(V1.0,V2.0,心跳包,GPS定位,7种飞行模式)
1. 什么是MAVLink在无人机和无人船的控制中,因为无人机的控制是一种插入式设备,而地面站是一台先进的计算机(通常是Windows或Linux),所以两者之间存在差距. 因此,如何在不同系统之间进行通信以确保相互理解彼此发送的信息成为一个问题. 例如,中国人可以与日本人交流. 中国人说中文,日本人说日语. 显然,他们无法沟通. 这时,世界规定英语是世界通用语言. 中文和日语都学习英语之后,两者就可以继续...
坚持就是胜利
06-20

968
分析GPS定位的基本原理
定位服务已成为越来越热门的技术,并且将来将成为所有移动设备(智能电话,掌上电脑等)的标准. 在定位和导航技术中,一种精度最高,应用最广泛的技术自然就是GPS. 互联网上有很多的资料介绍GPS的原理,本文试图以一种易于程序员从程序员的角度理解的方式来简要介绍GPS定位的基本原理,以期启发做这件事的朋友. GPS开发. 当然,本文不涉及特定的开发技术. 1. GPS定位的数学模型...
wb790238030的博客
08-20
5909
【无人机学习笔记2】无人机导航指导与控制
整理出控制和飞行力学的一些基本原理后,是时候正式进入有关无人机导航,制导和控制的讨论了. 导航制导是无人机系统中最复杂的子系统,其功能可以分为多种方法. 在本文中,我们以以下框图所示的划分方法为例,来指导无人机导航制导和控制系统. 介绍并总结了基本原理和常用方法. 由于GPS的广泛应用,室内定位甚至是生活中的自动驾驶,“导航”,“引导”和“控制”一词已越来越为公众所熟悉和使用,但是对于这些人……
国庆博客
03-12
488
GPS定位,DGPS差分定位,RTK无人机差分定位
1. GPS定位GPS卫星不断在空中发送带有时间和位置信息的信号,以供GPS接收. 由于传输距离的原因,与卫星发送信号的时间相比,接收机接收信号的时间被延迟,通常称为延迟. 因此,距离也可以由延迟来确定. 卫星和同时生成相同的伪随机码. 一旦这两个代码实现了时间同步,接收机就可以测量时间延迟. 将时间延迟乘以光速即可得出距离. 由于“卫星时钟与时钟之间的同步误差”的影响尚未得到纠正差分gps原理,因此测得的距离包含...

AsNeverBefore的博客
03-23
4558
单片机差分GPS定位系统的设计
背景意义随着GPS定位的不断发展和普及,用户对GPS定位精度的要求越来越高. 单点的GPS定位精度只能在水平方向上达到几十米的精度. 在实际应用中,通常无法满足要求. 差分GPS定位技术可以实现米级的定位精度甚至更高的精度. 可以通过购买现成的差分GPS设备直接定位,但是价格昂贵. 利用普通的GPS接收机和单片机建立单片机的差分GPS定位系统,可以有效地提高定位精度,并且具有设备简单,成本低廉,使用灵活等特点. ..
ANDYMFC的博客
11-24
20,000 +
UAV光流定位系列-(1)原理分析
当我参加深圳高科技博览会时,我在高通展览区看到了各种微型无人机. 每个人都可以发现这些无人机使用了一种称为光流定位的技术,许可能仍然不了解什么是光流定位以及如何进行定位. 今天,我将带您了解光流定位的原理. 无人机上的光流定位通常使用无人机底部的收集图像数据,然后使用光流算法计算两帧图像的位移,然后实现无人机的定位. 这种定位方法...
wb790238030的博客
09-21
1777
【无人机研究笔记4】GPS和RTK技术
RTK技术的常规GPS测量方法是什么,如静态,快速静态和动态测量,都需要在以后解决,以获取厘米级的精度,而RTK是可以获取厘米级定位精度的测量方法在实时领域中,它使用了载波相位动态实时差分(Real-time Kinematic)方法差分gps原理,这是GPS应用程序中的一个重要里程碑. 它的出现为工程放样,地形图和各种控制测量带来了新的曙光,极大地改善了该领域. 运营效率. 高精度GPS测量必须使用载波相位...
ZackSock的博客
03-10
50,000 +
不要再切割自己的图片,Python使用5行代码来实现批量切割
序言对于那些了解PhotoShop的人来说,获得照仍然很简单,但是仍然有很不擅长PhotoShop. 今天,我将为您带来一个非常简单的方法,以便使用Python快速生成照片. 照片的背景颜色取决于您. 实现原理生成证书照片的原理非常简单,可以分两步完成. 首先,我们需要裁剪,然后在透明区域中填写相应的颜色,并根据需要填写相应的颜色. 如果以前没有帮助,我几天前就发现了PaddleH,这是一种深度学习开发工具...
tyst08列
09-18
1326
GPS从入门到废弃(3)--- GPS坐标系
GPS从进入到废弃(3)-GPS坐标系定位需要坐标. 当然,坐标是相对于坐标系的. 为了描述物体的位置,我们首先需要建立一个坐标系. 根据主要类别,坐标系可以分为惯性坐标系和非惯性坐标系. 惯性坐标系是在空间中固定或以恒定速度线性运动的坐标系,而其他坐标系是非惯性坐标系. GPS中大约包含五个坐标系. 在讨论这五个坐标系之前,我们需要了解一些基本概念. 极点的基本概念: (Polar)地球的旋转轴和地球的表面...
王John的博客
09-20
10,000 +
差分定位和精确定位(2)-单差,双差,三差
63.blog.163.com/blog/static/85819389201444102148501/精确定位是差分定位(相对定位)的一种应用. 在精确的相对定位中,参考站不会广播有关GPS测量值的差分校正. 相反,他直接广播其GPS测量值,然后允许用户通过差分操作将这些测量值与自己的测量值组合在卫星上,最后使用组合测量以求基线矢量并完成...
wb790238030的博客
08-20
2641
【Drone学习笔记1】无人机导航技术及其特性分析
导航技术是无人机技术中最关键和最重要的技术之一. 首先,逐一介绍了无人机导航中使用的单一导航技术,并分析了每种导航技术的优缺点. 然后,强调了近年来成为热点的组合导航技术. 最后,对无人机导航技术的未来发展趋势进行了展望. 外表. 简介无人机导航是根据所需的精度,在规定的时间内沿着预定的路线将无人机正确地引导到目的地. 为了使无人机成功完成预定的导航任务,除了目标的起点和位置之外,您还必须了解无人机...
u010821757的博客
02-15
10,000 +
强烈推荐10个Chrome浏览器插件集
在Firebug时代,我是Mozilla Firefox浏览器的忠实支持者;但是后来我不知道为什么,该插件停止了开发,导致我不得不寻找一种新的Web开发工具. 在此期间,许开始推荐Ch ...
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-235314-1.html
-

-
郑珊
最终
 佳能EOS爱好者最喜欢的佳能5红色圆圈头
佳能EOS爱好者最喜欢的佳能5红色圆圈头 port unreachable_icmp host unreachable_host unreachable什么意思
port unreachable_icmp host unreachable_host unreachable什么意思 电视背景墙朝哪个方向?看看专家怎么说
电视背景墙朝哪个方向?看看专家怎么说
经济上他拿我们没有办法只能一天天看着我们追上他超过他