GPS定位原理
电脑杂谈 发布时间:2020-04-29 20:16:25 来源:网络整理
全部展开
GPS(全球定位系统)是美国建立的卫星导航和定位系统. 借助该系统,用户可以在全球范围内实现全天候,连续,实时的三维导航,定位和速度测量;此外,借助该系统,用户还可以进行高精度的时间传递和高精度的精确定位.
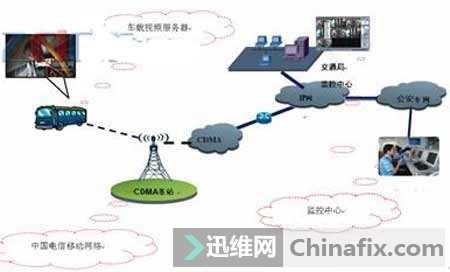
在现实生活中,GPS定位主要用于对移动人员,宠物,汽车和设备进行远程实时定位和监视. GPS定位是一种结合了GPS技术,无线通信技术(GSM / GPRS / CDMA),图像处理技术和GIS技术的定位技术. 它主要可以实现以下功能:
1. 跟踪和定位
监控中心可以每天24小时监控所有受控车辆的实时位置,行驶方向和行驶速度,以便及时掌握车辆的状态.
2. 曲目播放
监控中心可以在近60天的自定义时段内随时重播车辆的历史行驶和跟踪记录. (视情况而定,可选轨道DVD刻录服务)
3. 警报(报告)
3.1,超速报警: 当车速超过监控中心的7a64e4b893e5b19e31333339666665预设速度时,及时向监控中心报告
3.2,区域警报(电子围栏): 监控中心设置区域范围,如果车辆超过或驶入预设区域,车辆将向监控调度中心发出相应的警报
3.3,停车报告: 调度中心可以文本形式生成有关车辆历史停车记录的报告,该报告描述了车辆的停车位置,时间和行驶时间,并可以打印出来.
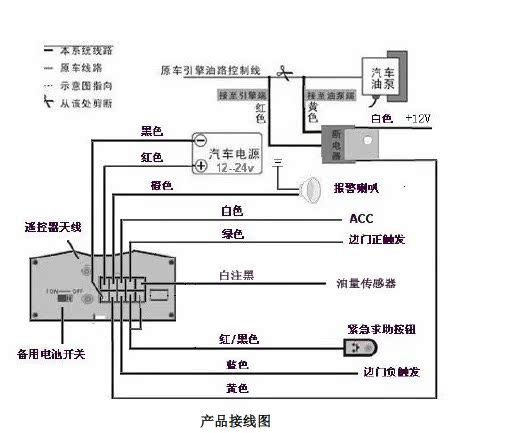
3.4,紧急警报: 如果发生紧急情况(例如被抢等),请立即按紧急警报按钮,以向监管中心报告. 监控中心将立即知道您处于紧急状态以及您所在的位置. 验证后,输入警察处理程序以帮助您摆脱危险. (注意: 一旦激活紧急警报按钮,此设备将立即关闭通话功能,但短信功能正常)
3.5,欠压报警,当汽车电池电压过低时,车载主机会自动向监控中心报警,监控中心值班人员会提醒用户及时给车辆充电.
3.6. 切线警报. 当车辆的主电池损坏或无法供电时,内置的备用电池可以保持产品继续工作,并向监控中心发送切线警报.
4. 地图制作功能
根据查看需求,客户可以添加和修改自定义地图路线,以更好地为业务运营服务

5. 里程统计
该系统利用GPS车载终端的行车记录功能和GIS地理系统的原理,对车辆的行驶里程进行统计,并生成报告并打印出来.
6. 车辆信息管理
便捷且易于使用的管理平台提供了车辆,驾驶员,车辆图片等设置,以方便派遣员工的工作.
7. 短信通知功能
必要时将各种车辆的警报或状态信息发送到管理员的手机,以便随时随地掌握车辆的重要状态信息.
8. 车辆
监控中心可以远程切断车辆的燃料和电源,并随时锁定车辆.
9. 车载电话
可以像普通手机一样拨打汽车电话,调度中心可以为此电话设置远程权限,即呼叫限制,呼叫限制,并且只能拨打指定数量的电话号码.
10. 油耗测试
实时监控车辆的油耗变化,并生成历史时期的油量变化报告或油量曲线图,可以直观地反映出正常和异常的油耗以及油量不足等情况,实现了高油耗. 燃油消耗管理,杜绝不良事件的发生. (需要匹配机油传感器)
11. 车辆调度
调度员确定调度车辆或在地图上绘制调度范围. GPS系统会自动将调度命令发布到车辆或绘制范围内的所有车辆. 被调度车辆及时响应调度中心,以确定调度命令的执行状态. GPS系统还可以对每个车辆的成功调度次数进行每月统计. 智能自我检查车载终端可以进行自我诊断. 一旦发生故障,它将向中心发送故障通知车载定位报警原理,以方便维护人员并确保设备的正常运行.
GPS项目始于1973年,并于1994年全面投入运营. 整个GPS系统由空间部分,地面控制部分和用户部分组成:
空间部分(空间部分)
GPS的空间部分由24颗GPS工作卫星组成,这些卫星共同构成了GPS卫星星座,其中21颗可用于导航的卫星,3颗是活动的备用卫星. 这24颗卫星以6°的轨道绕地球旋转,倾角为55°. 卫星的运行时间约为12个小时. 每个GPS工作卫星都发出用于导航和定位的信号. GPS用户使用这些信号来工作.
控制部分
GPS的控制部分由一个监视系统组成,该监视系统由分布在世界各地的多个跟踪站组成. 根据它们的不同功能,这些跟踪站分为一个主控制站,一个监视站和一个注入站. 在美国科罗拉多州的猎鹰空军基地有一个主控制站. 它的功能是根据每个监视站的GPS观测数据计算卫星星历表和卫星时钟的校正参数. 等等,并通过注入站将这些数据注入卫星;同时,它还控制卫星并向卫星发出指令. 当工作卫星发生故障时,它将调度备用卫星以替换发生故障的工作卫星;另外,主控站还具有监视站的功能. 有五个监控站. 除主控制站外,其他四个分别位于,扬升,迭戈·加西亚和夸贾林. 用于接收卫星信号并监视卫星的工作状态;有三个注射站,分别位于上生,迭戈加西亚和夸贾林. 注入站的作用是将卫星星历表和控制站计算出的卫星时钟校正值注入到卫星中.
用户部分(地面接收)
GPS的用户部分由GPS,数据处理软件和相应的用户设备(例如计算机气象仪器)组成. 它的作用是从GPS卫星接收信号,并将这些信号用于导航和定位. 以上三部分共同构成一个完整的GPS系统. GPS信号
GPS卫星发送两种频率的载波信号,即频率为1575.42MHz的L1载波和频率为1227.60MHz的L2载波. 它们的频率分别是基本频率10.23MHz的154倍和120倍,其波长分别是19.03cm和24.42cm. 各种信号分别在L1和L2上调制. 这些信号主要包括:
C / A代码
C / A码也称为粗采集码. 它在L1载波上进行调制,是一个1MHz的伪随机噪声代码(PRN代码),代码长度为1023位(周期为1ms). 由于每个卫星的C / A码不同,因此我们经常使用它们的PRN号来区分它们. C / A码是普通用户用来确定台站与卫星之间距离的主要信号.
P代码
P代码也称为精细代码. 它在L1和L2载波上进行调制,是一个10MHz的伪随机噪声代码,周期为7天. 在AS的实现中,将P代码和W代码以模二的形式相加,以生成秘密的Y代码. 目前,一般用户无法使用P代码进行导航和定位.
Y码
请参阅P代码.
导航信息
导航信息在L1载波上以50 Hz的信号频率进行调制,包括GPS卫星轨道参数,卫星时钟校正和其他系统参数. 用户通常需要使用此导航信息来计算GPS卫星在特定时间在地球轨道上的位置. 导航信息也称为广播星历.
SPS和PPS是GPS系统,可为不同的用户提供两种不同类型的服务. 一种是标准定位服务(SPSS标准定位服务),另一种是精密定位服务(PPSP精确定位服务). 这两种不同类型的服务分别由两个不同的子系统提供,标准定位服务由标准定位子系统(SPSS标准定位系统)提供,精确定位服务由精密定位子系统(PPSPrecision定位系统)提供.
SPS主要面向全世界的平民用户.
PPS主要针对美国军事部门及其盟国和民用许可用户.
在GPS定位中,通常使用以下一项或多项观察数据进行数据处理,以确定待确定点的坐标或待确定点之间的基线矢量:
L1载波相位观测值
L2载波相位观测值(半波或全波)
C /在L1上伪码调制的代码
在L1上调制的P码伪距
在L2上调制的P码伪距
L1的多普勒频移
L2的多普勒频移
实际上,在执行GPS定位时,除了将上述观测值用于数据处理之外,还经常使用由上述观测值通过某些组合形成的一些特殊观测值,例如宽车道观测值(宽车道),车道观测(窄车道),以及消除电离层延迟的观测(无离子)以进行数据处理. GPS错误
当我们使用GPS进行定位时,我们会受到各种因素的影响. 影响GPS定位精度的因素可以分为以下四类:
人工
出于国家利益,美国政府通过降低广播星历的准确性(技术)并在GPS参考信号中增加高频抖动(技术),人为地降低了使用GPS进行导航和定位的普通用户的准确性.
卫星星历错误
在执行GPS定位时,通过各种类型的星历[7]提供了在特定时间计算GPS卫星位置所需的卫星轨道参数[7],但是无论使用哪种类型的星历,计算出的位置卫星的位置将不同于其实际位置,这称为星历误差.
卫星时钟差

卫星时钟差是GPS卫星上安装的原子钟的钟面时间与GPS标准时间之间的误差.
卫星信号发射天线的相位中心偏移
卫星信号发射天线的相位中心的偏差是GPS卫星上信号发射天线的标称相位中心与其真实相位中心之间的差. GPS定位的基本原理是根据高速移动的卫星的瞬时位置作为已知的起始数据并采用空间距离切除的方法来确定要测量的点的位置. 如图所示,假设在时间t将GPS接收机放在要测量的地面上,则可以测量到达接收机的GPS信号的时间△t,并且接收机的卫星星历表和其他数据可以确定以下四个方程式: 上面四个方程式中待测点的坐标x,y,z和Vto是未知参数,其中di = c△ti(i = 1,2车载定位报警原理,3,4).
di(i = 1,2,3,4)是卫星1,卫星2,卫星3和卫星4到的距离.
△ti(i = 1,2,3,4)是卫星1,卫星2,卫星3和卫星4的信号到达所花费的时间.
c是GPS信号的传播速度(即光速).
四个方程式中每个参数的含义如下:
x,y,z是要测量的点的坐标的空间直角坐标.
xi,yi,zi(i = 1、2、3、4)是卫星1,卫星2,卫星3和卫星4在时间t的空间直角坐标,
可以从卫星导航消息中获取.
Vt i(i = 1、2、3、4)是分别由卫星星历表提供的卫星1,卫星2,卫星3和卫星4的卫星时钟的时钟差.
Vto是的时钟差.
要测量的点的坐标x,y,z和的时钟差Vto可以通过上述四个方程式求解.
实际上,通常可以锁定4颗以上的卫星. 此时,可以根据卫星的星座将分为几组. 每个小组有4颗卫星. 定位,从而提高准确性.
由于卫星轨道,卫星时钟的误差,大气对流层和电离层对信号的影响以及人为的SA保护政策,民用GPS的定位精度仅为100米. 为了提高定位精度,通常使用差分GPS(DGPS)技术来建立用于GPS观测的参考站(差分站). 参考站的已知坐标用于与观测值进行比较以获得校正号并将其发布. 接收到校正号后,会将其与自己的观察值进行比较,以消除大多数错误并获得更准确的位置. 实验表明,使用差分GPS可以将定位精度提高到5米.
汽车导航系统主要由导航主机和导航显示终端组成. 内置GPS天线将从地球周围的24个GPS卫星中的至少三个接收数据信息,从而确定汽车的当前位置. 导航主机通过GPS卫星信号确定的位置坐标与电子地图数据相匹配,从而可以确定汽车在电子地图中的准确位置.
在此基础上,它将实现多种功能,例如驾驶导航,路线推荐,信息查询和AV / TV播放. 驾驶员只需观看显示屏上的屏幕,听取语音提示,并用手操作即可实现上述功能,从而轻松驾车.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-193359-1.html
 如何从入门级到主镜头选择单反升级
如何从入门级到主镜头选择单反升级 乐迅手机兴趣社 邯郸男女嘉宾为爱出击!“无视”游戏规则主动“犯规”
乐迅手机兴趣社 邯郸男女嘉宾为爱出击!“无视”游戏规则主动“犯规” 导航犬离线版新版本下载 10.0.4.4504471 安卓版
导航犬离线版新版本下载 10.0.4.4504471 安卓版 什么系统都能查看文本复制到word中重新排版修改
什么系统都能查看文本复制到word中重新排版修改
知道什么叫“炒”吗