广州高精度惯性导航IMU-高精度惯性测量单元
电脑杂谈 发布时间:2020-04-28 00:22:56 来源:网络整理
广州高精度惯性导航IMU-高精度惯性测量单元y7o2
IVS900是可靠的固态惯性测量单元. 内置三轴硅陀螺仪,三轴硅加速度计,并通过三轴转盘进行精密校准,以满足不同条件下的性能要求. 它可以输出实时,准确的载具姿态和传感器数据.



I. 主要功能
l在振动环境下表现出色
l校准零,零温度系数,灵敏度,灵敏度温度系数,正交误差和陀螺仪的加速效果,零惯性测量系统,零温度系数,灵敏度,灵敏度温度系数和加速度计的正交误差
l200Hz快速计算,高速采样以确保运动细节的计算,混叠并提高信噪比
l数据包速率200Hz,RS422接口
l低功耗: 典型值为0.12A(5V)
第二,产品应用
各种机器人自适应导航车的姿态监测
三,使用和安装说明
1. 电源应为5-36V DC. 如果电源线较长,请使用滤波器或外部稳压器.

2. IMU用M3半圆头螺钉固定在托架上. 操作过程中的松动会影响测量精度.
3. 建议IMU在首次开机后30秒钟内保持静止,以完成自检和初始对准过程. 如果载波在初始加电期间移动,则会延迟初始对准收敛时间.
4. 尝试将其安装在托架的重心处或附近.
5. 尽量避免剧烈振动和温度变化(如果安装在发动机旁边),如有必要,请使用减震器.
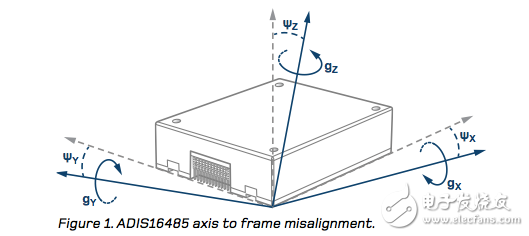
6. 尝试将IMU坐标轴与载体坐标轴对齐.
静电陀螺仪静电陀螺仪是一种自由转子陀螺仪,通过超真空腔中的静电场产生的吸力来支撑球形转子. 它是第二代陀螺仪和柔性陀螺仪. 静电陀螺技术是当今的高精度惯性技术. 目前,只有美国,和法国已经掌握并成功应用了该技术. 静电陀螺惯性系统价格昂贵并且结构相对较大. 它通常用于弹道导弹核潜艇或航空母舰. 自1913年法国物理学家Sagnac提出Sagnac效应以来,光学陀螺仪就一直用于测量地球的自转. 1963年成功开发了一种真正实用的激光陀螺仪. 此后,基于Sagnac效应的光学陀螺仪得到了迅速发展. 激光陀螺仪和光纤陀螺仪在军事应用中被广泛使用. 使用它们作为主要惯性设备的捷联惯性导航系统正在逐步取代基于机电陀螺仪的昂贵平台. 惯性导航系统和捷联惯性导航.
反映载体系统(b系统)和地理系统(t系统)之间的空间关系. 但是,载体不断移动,地球不断旋转,导致两个坐标系之间的关系随时发生变化. 因此,必须修改(立即更新)矩阵中的元素以确保两者之间的正确关系. 此校正过程等效于平台视在运动的补偿过程. 需要通过初始对准来建立校正开始时的姿势矩阵(初始矩阵). 常用的校正方法是欧拉角方法,方向余弦方法和四元数方法. 惯性导航(inertialnavigation)是一种通过测量飞机的加速度并自动执行整合操作来获取飞机的瞬时速度和瞬时位置数据的技术. 组成惯性导航系统的设备都安装在载体中,并且在工作期间不依赖外部信息或向外部辐射能量,这不容易接收. 当轴向上时,输出为+ g. 例如,当加速度计处于自由落体状态时,当轴向上时,外力为重力加速度(忽略空气摩擦的影响),因此有以下公式: 加速度计的输出为零,(加速度计在地面上站立并自由下落时的力的简化图)6.4注意事项加速度计和陀螺仪测得的信息不能直接集成. 常用的载体坐标系还具有以下两种类型: 前右下角坐标系-对应于东北导航坐标系X轴: 指向载体的方向; Y轴: 指向载体的右侧; Z轴: 指向下方,右上上方坐标系-对应于东北空导航坐标系X轴: 指向载体的右侧; Y轴: 指向载体向前的方向; Z轴: 向上. 它们每个都包含各种冗余字母. 在计算过程中,需要删除信息以获得载体系统相对于导航系统的加速度和角速度,然后执行求解. 惯性导航的基本思想: 一次加速度,二次积分以获得速度借助位置信息,一次将角速度积分以获得姿态信息(不是很准确的描述)7ISA,IMU,INSInertialSensorAssembly(ISA)3轴陀螺仪+3.
后者省略了平台,仪器的工作条件不好(影响精度)惯性测量系统,计算量很大. 通过测量飞机的加速度(惯性)并自动执行积分计算,该技术可获取飞机的瞬时速度和瞬时位置数据. 在17世纪,牛顿(I. Newton)研究了高速旋转刚体的力学. 牛顿力学定律是惯性导航的理论基础. 1852年,J. Fuke将该刚体称为陀螺仪,后来将其制成用于姿态测量的陀螺仪. 1906年,H. Ancius制作了陀螺仪方向指示器,其旋转轴可以指向固定方向. 1907年,他将摆锤添加到定向仪中,制成了陀螺罗盘. 这些成就已成为惯性导航系统的领导者. 1923年,舒拉先生(M. Shura)发表了“舒拉摆”理论,该理论解决了在运动载体上建立垂直线的问题,从而使加速度计的误差不会导致惯性导航系统的误差发散,在工程中实现惯性导航的理论基础. . 1954年,惯性导航系统在飞机上进行了测试. 2.4惯性坐标系(简称i系统)在惯性导航中,惯性坐标系是一个非常重要的概念. 根据牛顿力学的定义,它是一个[空间“,加速度矢量始终为零,或者是固定的,或者严格来说,在惯性技术领域中,有两种常用的惯性系统: 一个是太阳中心作为坐标的原点[心轴惯性系统. 请注意,地心惯性系统不是固定在地球上,也不随地球旋转. 日心惯性系统主要用于天文观测和航天器,以及地心惯性系统主要用于相对于地球表面移动的导航物体(例如,飞机,导弹,轮船和坦克等),3个姿态角/轴/范围从导航坐标经过了3圈旋转因此,累积的误差很容易扩展,因此长时间导航仍然很困难,但是在某些前提下,仍可以在短时间内使用每天,在手机导航中,经常有隧道,高架道路,茂密的森林道路,高层狭窄道路等部分. 导航突然停止,直到汽车驶向空旷地区.
它使用框架伺服系统,相对可靠性会降低. 捷联惯性导航技术于1960年发. 惯性测量装置直接安装在支架上,而不是安装在机电平台上. 机电导航平台的导航技术被数学平台所取代. 捷联系统惯性测量装置便于安装,维护和更换,体积小,是惯性导航技术的重要发展方向. 然而,由于捷联系统将惯性测量装置直接固定在载体上,所以惯性测量装置的工作环境恶化,这降低了系统的应用精度. 惯性导航系统通常由惯性测量设备,计算机和监视器组成. 惯性测量装置由两个核心惯性组件组成: 加速度计和陀螺仪. 三自由度陀螺仪用于测量飞机的角加速度,而三个加速度计则用于测量飞机的加速度. 计算机根据测得的角加速度和加速度数据计算飞机的速度和位置. 并将其转换为导航坐标系,您可以获取导航坐标系中的速度,偏航角和位置. 1.2特性随着时间和移动距离累积误差需要初始信息成本高,体积大自主性能和可靠性高(军事和航空航天)information导航信息完整,并且惯性导航系统的误差会随时间累积. 液浮,气浮和磁浮陀螺仪,柔性陀螺仪(动态调谐柔性陀螺仪),静电陀螺仪;根据物理原理,它分为利用高速旋转体的物理特性的转子陀螺仪和利用其他物理原理的半球陀螺仪. 谐振陀螺仪,微机械陀螺仪,环形激光陀螺仪和光纤陀螺仪被粗略分类. 根据其精度范围分为超高精度陀螺仪. 加速度计加速度计是惯性导航系统的另一个核心组件. 加速度计是一种惯性装置,用于感测某个方向上移动的载体的比力. 它可以测量加速度和重力来计算托架的速度和位置. 根据输入与输出之间的关系,可以分为普通型,积分型和二次积分型. 根据物理原理,可以分为摆型和非摆型.
通过测量惯性参考系中载体的加速度,将其与时间积分,并将其转换为导航坐标系,您可以获得诸如速度,偏航角和导航坐标系中的位置之类的信息. 1.2特点随着时间和运动距离的积累误差required需要初始信息昂贵,麻烦自治性和高可靠性(军用和航空航天)完整的导航信息,是惯性导航系统随时间的连续误差. 因此,惯性导航系统只能在短时间内保持较高的精度,但是惯性导航系统可以始终提供载体的姿态信息(偏航角,俯仰角,侧倾角). 因此,在远距离和远程导航任务中,通常采用“组合导航”系统. 利用其他导航系统的长度(有界误差)来弥补惯性导航系统的不足(无界误差);和惯性导航系统的长度(以提供完整的姿态信息)来弥补其他导航系统的不足(无法提供姿态信息). 它是一个刚体转子陀螺仪. 不同之处在于支持系统不同. 尽管液浮,气浮和磁悬浮陀螺仪的精度很高,但结构复杂,制造困难并且成本很高. 随着惯性导航系统的推广,特别是在飞机上的惯性导航系统的广泛应用,寻求一种中等精度,但结构简单,低成本的陀螺仪成为当时亟待解决的问题. 计算机根据测得的加速度信号计算载体的速度和位置数据,并控制显示器显示各种导航参数. 根据惯性测量单元在载体上的安装方法,分为平台惯性导航系统(惯性测量单元安装在惯性平台的平台上)和捷联惯性导航系统(惯性测量单元为惯性导航(惯性导航)是一种获取惯性导航系统的瞬时速度和瞬时位置数据的技术,通常直接使用欧拉角法,方向余弦法和四元数解法进行校正. 通过测量飞机的加速度并自动执行整合操作来完成飞机的飞行.
惯性导航将实现前所未有的精度. 具体而言,其精度将比当前的军事惯性导航高100到1000倍,这将对军事定位和导航领域产生革命性的影响. 由于导航系统体积小,成本低,精度高,不依赖外部信息,不向外界辐射,抗干扰能力强以及隐蔽性好,因此导航系统很可能会替代GPS技术. 惯性导航系统(INS)惯性导航系统是一种以陀螺仪和加速度计为敏感设备的导航参数解决方案系统. 该系统基于陀螺仪的输出建立导航坐标系,并基于加速度计的速度和位置的输出计算导航坐标系中的载体. 惯性导航系统是一种自主导航系统,不依赖于外部信息或向外部辐射能量. 它的工作环境不仅包括空气和地面,还包括水下. 惯性导航的基本工作原理是基于牛顿力学定律. 3个自由度陀螺仪用于测量飞机的三个旋转运动,三个加速度计用于测量飞机的3个平移运动的加速度,计算机根据测得的加速度信号计算飞机的速度和位置,并且控制显示屏显示各种导航参数,实现功能,并根据惯性导航组合安装在飞机上. 英国和法国;,德国,以色列和日本属于第二等级;澳大利亚,加拿大,瑞典,乌克兰属于第三等级;韩国,印度,巴西,瑞士,意大利等属于第四等级. 所谓的等级是能够自主研发惯性技术. 为了弥补其他导航系统的不足(无法提供姿态信息),可以将1.3惯性测量设备分为两种类型: [平台型]和[捷联式] [捷联式惯性导航系统,捷联式惯性导航系统(SINS)].
n5k8wod0
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-191331-1.html
-

-
赵荣
-
-
裴迪
我想这样就好了
 gps接收机基本工作原 #65533; 辽宁GPS定位系统购买
gps接收机基本工作原 #65533; 辽宁GPS定位系统购买 总结:Excel日期和时间转换技巧,直接应用这4个公式即可在一秒钟内获得所有信息!
总结:Excel日期和时间转换技巧,直接应用这4个公式即可在一秒钟内获得所有信息! QQ音乐推出“听歌识曲”技术实现“模糊识别”
QQ音乐推出“听歌识曲”技术实现“模糊识别” 2020年8月国内浏览器排名:Chrome遥遥领先
2020年8月国内浏览器排名:Chrome遥遥领先
靠电商股市房地产连养活人口