每天读取GPS接收机硬件电路设计电路图(280)
电脑杂谈 发布时间:2020-04-22 18:11:28 来源:网络整理
GPS由三部分组成: 太空卫星星座地面监视系统和用户接受设备. 作为具有实时定位和速度测量功能的导航系统gps模块原理图,其在定位精度和观测时间方面的优势使其成为该领域的首选.
硬件电路设计
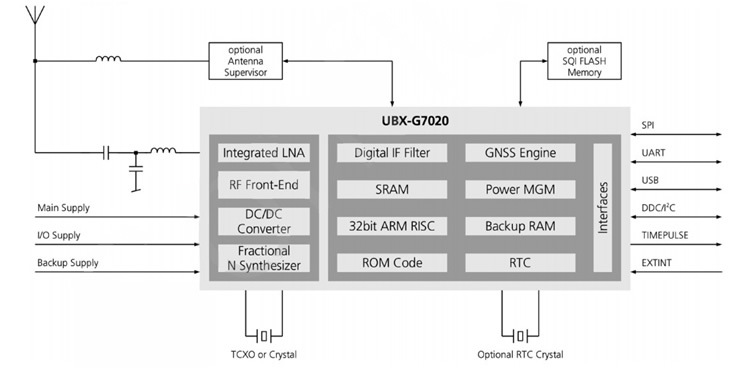
现有GPS接收机的基本框图如图1所示.


该系统的信号硬件主要包括4个功能单元: 天线单元,射频单元,相关器单元和微控制器单元. 根据现有架构和每个功能模块的发展状况,设计了安装的GPS,以实现实时定位,速度测量和计时.
相关核心模块的选择如下:

由卓联公司生产的GP2015用作的RF前端,以实现信号的下变频处理. GP2021芯片用作C / A码基带相关器,对中频数字信号进行解调和解扩以获得导航消息; TI公司浮点数字处理器TMS320C6747对接收机的自检,测量和搜索卫星信号进行相关计算.
天线单元
天线单元主要由天线,滤波器和前置放大器组成. 该单元的电路图如图2所示. 天线的功能是将卫星信号的极弱电磁波能量转换为相应的电流. 滤波器用于抑制带外干扰信号. 前置放大器放大信号电流,有时还具有频率转换效果.


射频单元
单元电路的核心芯片使用ZARLINK推出的GPS RF前端芯片GP2015. 具有功耗低,成本低,可靠性高的特点. 它采用TQFP封装,封装尺寸小,工作电源电压为3〜5V. 当芯片在3V电压下工作时,其功耗为200 mW.
GPS Ll信号经过天线,预选频率滤波器和低噪声放大器后输入到GP2015,GP2015将射频信号和不同频率的本地振荡器信号下变频为中频(IF), GP2021 5.714在MHz的采样频率下,中频信号被转换为频率为1.405 MHz的2位TTL电平输出. 因此,该单元有两个主要设计任务: 晶体振荡器设计和滤波器电路设计.
GPS接收机的定位精度gps模块原理图,信号精度和稳定性以及信号一致性要求很高,这对标准参考时钟的稳定性提出了更高的要求. 该系统使用高精度温度补偿晶体振荡器TCXO. 该晶体振荡器与外部匹配电路一起产生稳定的10.000 MHz参考时钟信号. 在25个标准温度下,其调节频率差为±1 ppm,负载电容为15pF. 在电源和GND之间串联连接10uF和100 nF电容器,以有效滤除电源噪声. 晶体振荡匹配电路的原理图如图3所示.

GP2015的滤波器电路设计分为三级: 第一级,设计为二阶切比雪夫滤波器,性能指标为中心频率175.42 MHz,带宽为2MHz,如图4所示: 滤波该设备使用Mitel的表面声波滤波器DW9255,中心频率为35.4 MHz,带宽为2 MHz(如图5所示). 第三阶段属于GP2015片上滤波. 它的功能是过滤掉A / D转换器. 噪声和干扰信号.


本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-185044-1.html
 用于三星Galaxy Note 10的邪恶辣椒USB适配器
用于三星Galaxy Note 10的邪恶辣椒USB适配器 什么样的移动电源可以为手机快速充电?充电宝有快速充电吗?
什么样的移动电源可以为手机快速充电?充电宝有快速充电吗? 五个音乐软件APP的比较横评谁拥有更好的体验?
五个音乐软件APP的比较横评谁拥有更好的体验? “数码兽的故事: 互联网侦探黑客回忆”《龙兽》评论
“数码兽的故事: 互联网侦探黑客回忆”《龙兽》评论
要冷静