您不知道的高精度地图|深度
电脑杂谈 发布时间:2020-04-18 09:09:58 来源:网络整理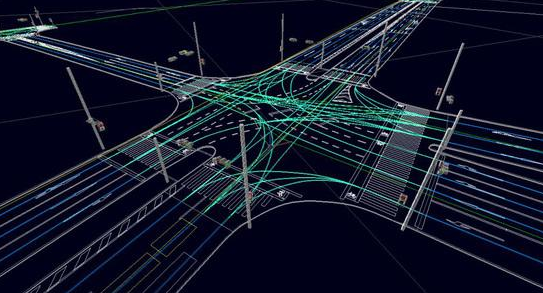
编者注: 高精度道路导航图具有更丰富,更详细的道路信息,可以更准确地反映道路的真实情况. 与传统地图相比,它具有更多的图层,更详细的图层内容,并具有新的地图结构划分. 正是由于高精度道路导航地图信息内容丰富,因此海量数据量巨大,而传统的集中式大数据处理模式无法满足其计算需求. 因此,本文提出了一种“众包+边缘计算”的大数据处理模式,以解决高精度道路导航图的计算问题. 目前,高精度道路导航图已进入快速发展状态,但在开发过程中仍面临一些需要解决的问题.
本文摘自2018年4月15日发表的《中国工程科学》. 作者为中国工程院院士,武汉大学刘敬南教授,郭驰副教授,武汉大学张宏民和左文伟,通航科技(北京)副总裁吴行斌,副教授杨Tu.
传统导航地图主要用于日常生活中地理信息的导航和查询,出行人员是他们的主要服务对象. 基于人类自身的视觉识别能力和逻辑思维能力,许多道路信息已得到简化[1]. 随着Internet时代的飞速发展,提出了更多新的基于位置的服务和行业,例如“ Internet +”智能交通和无人驾驶系统.
国家发改委为促进智能交通发展而提出的“互联网+”便捷交通实施计划已经正式发布. 这些服务都是在Internet上进行的,因此地图的服务对象不再只是人类,而是向机器的缓慢过渡,这对地图的准确性,内容结构和计算方式提出了新的要求.
普通导航图的精度约为5m. 它仅描绘了道路的位置和形状,而没有反映道路的详细信息. 无法准确知道车辆的位置.
图1高精度道路导航图与普通导航图的对比图
高精度道路导航图的绝对精度优于1m,相对精度为10-20cm. 它包含非常丰富的信息,例如车道,车道边界,车道中心线和车道限制信息,如图1所示.
高精度道路导航地图更真实地反映了道路的实际样式,因此它们包含更多的图层编号和道路数据,并且图层描述更加详细. 高精度道路导航图不仅具有高精度坐标,而且具有更精确的道路形状. 同时,还添加了每个车道的坡度,曲率,航向,高程等数据.
此外,车道之间的车道线条件(虚线,实线,单线和双线),车道线的颜色(白色,),道路隔离带,隔离带材质,道路箭头,文字内容和位置无处不在. 所有高精度道路导航图都需要详细描述.
高精度道路导航地图的数据量是普通地图的10 ^ 5倍甚至更多. 目前,以云计算为核心的集中式大数据处理模型已经不能满足需求.
随着物联网和5G通信技术的飞速发展,提出了边缘计算(一种云中的协作计算方法),并且众包的任务发布模型也已应用于多个行业. 因此,高精度道路导航图的大数据处理方式可以采用“众包+边缘计算”方式.
随着智能交通和自动驾驶领域的飞速发展,现有的普通导航地图在内容,准确性和完整性方面无法满足高层应用的需求[2]. 高精度的道路电子地图已经逐步提出并得到广泛认可[3,4].
目前,在辅助驾驶系统和自动驾驶领域中地形图精度,有许多使用高精度道路导航地图数据的研究. 例如,基于高精度道路导航图的信息行为和车辆定位研究[5,6],在辅助驾驶和自动驾驶系统中使用高精度道路导航图信息,并在道路上进行自动行车道轨迹引导方法的研究. 它[7,8].
关于构建高精度道路导航图的方法也有许多研究,例如,通过配备GPS-RTK的收集车沿特定线收集数据[9];使用激光雷达和广角相机相结合的方法来提取道路信息,再加上配备了高精度的全球卫星导航系统(GNSS)可以达到10cm的精度,但是这种采集方案相对昂贵[10];一些研究人员提出了一种通过全球定位系统+惯性导航使用低成本传感器创建车道级地图的方法. 该系统(GPS / INS)紧密耦合以进行定位,并从正射影像地图中获取相关地图信息[11]. ].
目前,越来越多的单位从事高精度电子地图的制图和制作. 在Google和戴姆勒的无人驾驶汽车的开发中,高精度电子地图是重要的组成部分[12]. 2015年,奥迪,宝马和戴姆勒共同斥资31亿美元购买了诺基亚此处地图,以准备开发高精度道路导航地图.
2015年,高精度道路导航地图已应用于特定场景. 2011年,宝马的3系跟踪训练器和奥迪的RS7在2014年使用了高精度道路导航地图技术,成功地在拉古纳塞卡和霍根海姆完成了赛道.
自2016年以来,许多互联网公司通过收购获取了地图数据资源,然后结合了自己的算法和云计算功能来生成高精度的道路导航地图,例如Google,Uber,百度和Ali. 同时,汽车公司已经开始依赖第三方地图服务. 2017年初,Mobileye与大众,宝马和日产签署了协议. 前者将为三大汽车巨头提供地图产品,而汽车制造商将负责为Mobileye提供更多地图数据.
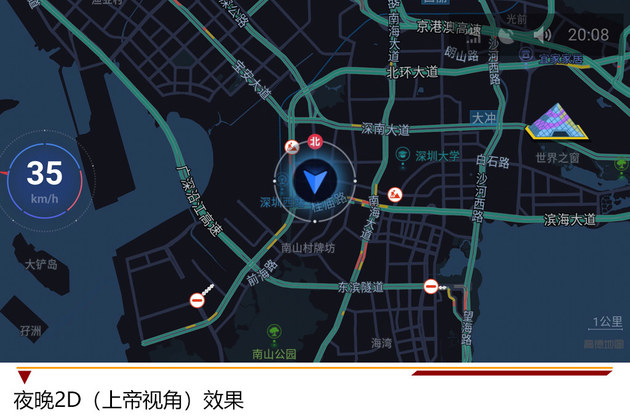
本文从“ Internet +”智能交通应用和未来20年无人系统行业发展的典型应用场景入手,将高精度道路导航图分为6层来建立需求模型,如图2所示.
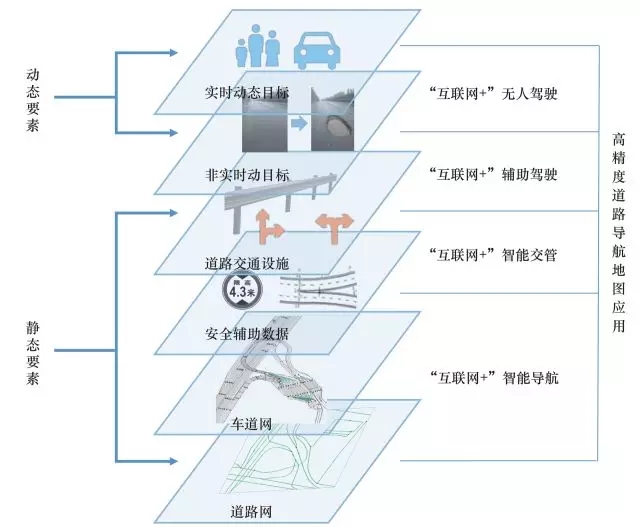
图2高精度道路导航图的应用分析
随着城市环境的不断建设,为了提高道路使用效率和缓解交通拥堵,许多新的交通管理措施得到了持续实施. 例如,多乘客车道(HOV车道),潮汐车道(见图3)等.

图3 HOV车道和潮汐车道
只有至少一定人数的车辆才能进入HOV车道. 潮汐车道指的是可变车道,即某个车道的方向将在不同时间段内发生变化. 这些新的交通管理方案的实现主要通过车道来实现,高精度的道路导航图可以准确地反映这些信息并为人们提供智能导航服务.
执法的管理存在很多困难,特别是在执法取证和应急响应方面. 高精度道路导航图可以为解决交通执法管理中的难题提供新的技术手段.
1. 交警执法领域
法律执法取证法证取证是道路执法领域的难题. 车道级违规是指在相对于地面车道或其他移动目标[13]的车道级内移动物体,例如在未授权车道上行驶,从而违反交通法规.
由于数据收集和现场恢复困难,这些行动目前难以执行和获取证据. 高精度道路导航图可以准确反映车辆行驶在哪个车道上,因此可以准确判断车辆是否存在车道等级违规,以满足执法和取证车道等级违规的需要.
2. 保险理赔领域

汽车保险理赔行业长期以来一直遭受欺诈性保险的困扰,并且已经消耗了大量的人力和物力. 这是因为员通常只能事后调查证据,而无法判断事故的整个过程. 高精度道路导航地图包含丰富而详尽的车道信息,因此可以准确反映车辆的行驶状态,并在地图上恢复事故的,从而可以帮助员准确判断事故.
无人驾驶场需要地图具有更精细的几何形状,并详细描述道路上每个车道的详细信息. 在拓扑网络上,还需要准确表达通道之间的连接关系. 高精度道路导航图包含多级几何拓扑数据,可以满足不同级别辅助驾驶和自动驾驶的应用需求.
此外,高精度道路导航地图还包含动态元素. 动态元素有两种,一种是半实时动态元素,主要用于自动驾驶领域的全局路径规划. 另一类是实时动态元素,主要是指动态障碍物,主要用于自动驾驶. 该系统实现局部路径规划.
道路地图会反映实际道路,通过特定图层绘制特定类别,然后叠加图层以表示道路表面. 终端上显示的导航地图通常由10层甚至20层不同分辨率的图片组成. 当用户缩放时,程序会根据缩放级别(网格用于模拟实体)选择不同分辨率的平铺地图,拼接成完整的地图. 高精度道路导航地图也是如此,只是它在普通电子地图的基础上包含更多的图层,并且每层的描述都更加详尽.
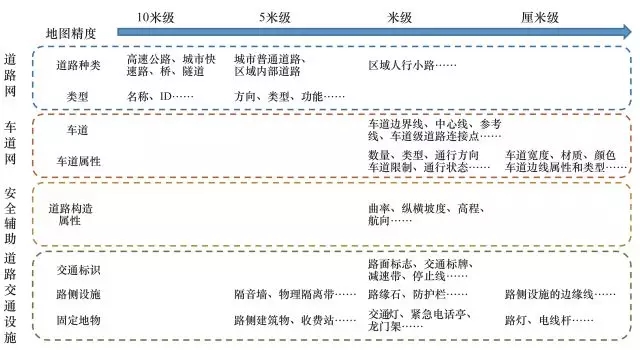
图4地图结构内容划分
高精度道路导航图由四个部分数据组成,即道路网络数据,车道网络数据,安全辅助数据和设施数据. 由这四种类型的数据形成的地图结构的内容根据地图的准确性而有所不同. 基本结构被分割并显示为示例,如图4所示.
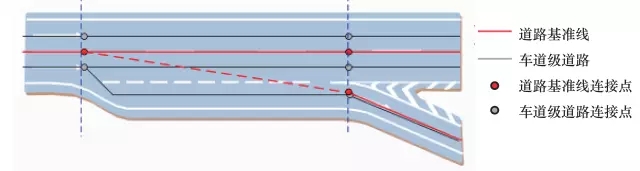
图5具有高精度道路导航图的路网
道路网络主要由道路基准网络组成,用于描述道路的几何形状并表达道路设施之间的关系. 高精度道路导航图的路网,如图1所示. 5,包括道路基准线,道路基准连接点和交叉点等图层.
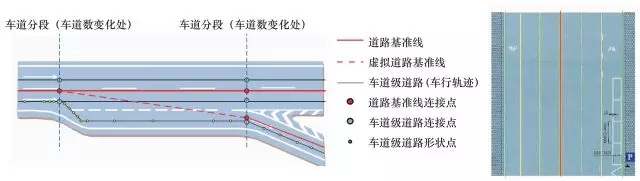
图6高精度道路导航图的车道网
车道网记录了路网中每个车道的相关属性,并用于车道级道路显示,定位,路径规划和驾驶策略辅助. 它包括车道级道路,车道级道路交叉点和车道级道路形状点等图层,如图6所示.
安全辅助数据和设施数据是对车道安全数据和车道上其他交通设施的描述,用于辅助车道级别的定位和显示,例如曲率,航向,垂直和水平坡度等.
设施数据包括交通标志,路边设施和固定要素.

高精度道路导航地图上描绘的道路信息更丰富且包含更多细节,因此其数据量也更大. 传统导航电子地图每公里的数据量约为1KB,高精度道路导航地图每公里的数据量约为100MB,是传统导航地图的10 ^ 5倍. 而且,高精度道路导航图中的数据类型复杂多样,数据量急剧增加,对数据处理的实时性要求很高.
因此,以云计算模型为核心的集中式大数据处理方法已不能满足高精度道路导航图的数据计算要求,需要建立新的计算模型. 提出“众包+边缘计算”模型作为高精度道路导航地图计算模型.
高精度道路导航地图的数据收集任务非常困难. 您需要收集在每条道路上行驶的车辆,然后上传数据以进行绘制. 首先,这需要很多时间. 其次,道路上的一些信息将会改变. 高精度道路导航图需要维护定期的数据更新. 再次收集大量信息是重复的,并且会消耗更多资源.
作者认为,这些问题可以通过众包解决. 高精度道路导航图的用户也可以是绘图员. 通过众包,将数据收集设备安装在使用高精度道路导航地图的车辆上,该地图在驾驶时使用地图时收集数据,并上传获取的数据. 这种方式可以很好地满足需要每周更新一次以反映其结构和新的交通方式的城市街道的需求. 美国的Mapper已采用这种方法来获取地图数据.
随着物联网和5G通信技术的飞速发展,研究人员提出了一种不同于传统云计算边缘计算的新计算模型. 边缘计算是指在网络边缘执行计算的计算模型. 在边缘计算中,边缘的下游数据代表云服务,上游数据代表高精度道路导航地图服务. 边缘计算的边缘是指云计算中心的数据源. 路径之间的任意计算和网络资源[14,15].
该计算方法是一个开放平台,在对象或数据源附近集成了网络边缘上的网络,计算,存储和应用程序的核心功能,并在附近提供了边缘智能服务,以实现敏捷的行业数字化连接,实时业务,数据优化,应用程序智能,安全性和隐私保护的关键要求.
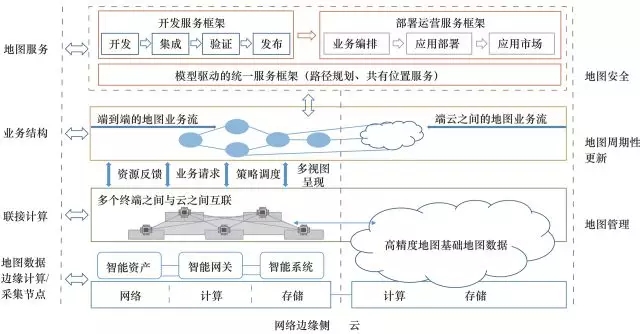
图7高精度道路导航地图边缘计算模型参考系
根据高精度道路导航图的情况,在边缘计算中,由于数据量的增加和实时性的需要,有必要将原始云中心的计算任务迁移到网络边缘改善数据传输性能的设备可确保实时处理并减少云计算中心的计算负荷. 本文开发了一种高精度道路导航地图边缘计算模型的参考框架,如图7所示.
目前地形图精度,有越来越多的单位从事高精度道路导航地图的测绘,制作,但是每个操作单位的技术水平,设备,操作方法,数据处理和结果都是不同. 不同企事业单位采用的标准也不一致.
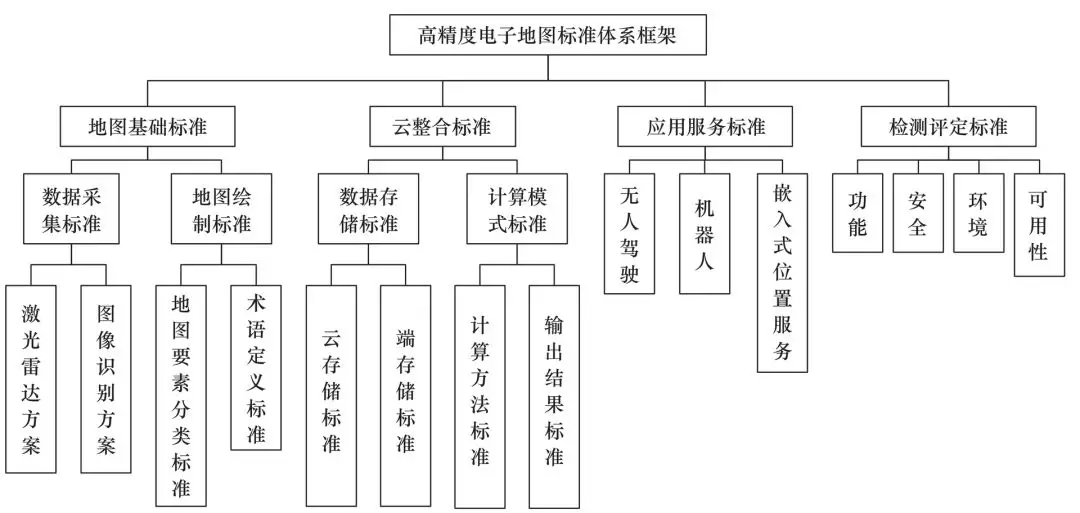
图8高精度电子地图标准系统框架
这给高精度道路导航图的管理和共享带来了问题,因此迫切需要加强高精度道路导航图标准系统框架的开发. 高精度电子地图标准系统框架是构成高精度电子地图标准系统的基本单元. 它包括四个部分: 基本地图标准,云集成标准,应用程序服务标准以及测试和评估标准,如图8所示.
为了国家安全,许多国家在公共地图上收集和绘制信息也有许多规定,包括准确性,测绘区域,机构和人员等许多限制. 因此,有必要进一步规范公共地图信息采集与高精度道路导航地图数据保护政策,在确保信息安全与鼓励高精度道路导航地图技术发展之间寻求最佳平衡和解决方案.
传统的导航地图具有常规的加密方法,例如电子地图版本审查和补偿措施,但是现在这些地图加密方法与高精度的道路导航地图之间存在矛盾. 因此,在未来的发展中,我们必须对高精度的道路导航图具有创新的思维. 实际的导航和定位服务都是本地的. 也许我们可以尝试用相对坐标系来解决定位精度的安全性问题.

传统的导航地图由其商业地图公司及时,准确地更新,以确保导航服务的准确性. 除了道路/车道的几何信息之外,高精度道路导航图的更新过程还包括大量数据更新,其中包括交通要素. 此外,高精度道路导航地图本身包含大量数据. 如果每次都使用原始收集方法更新数据,则将导致过多的冗余数据和过多的成本. 因此,在高精度道路导航图的未来发展中,利用众包获取用户手中的大量及时数据是一种更加方便,廉价,可靠的数据更新方法.
参考
[1]刘少山,唐杰. 第一本无人驾驶技术书籍[M]. 北京: 电子工业出版社,2017
[2] Tao Z,Bonnifait P,Fremont V等. 使用GPS,车道标记和本体感受传感器进行地图绘制和定位[C]. 东京: 智能机器人和系统(IROS),2013年IEEE / RSJ国际会议,IEEE,2013年
[3] Nedevschi S,Popescu V,Danescu R等. 通过将视觉数据与数字地图对齐,在交叉路口进行准确的自我车辆全局定位[J]. 智能交通系统,2013,14(2): 673 –687
[4]何勇. 基于高清地图的GPS导航方法研究[D]. 上海: 上海交通大学(硕论文),2015年.
[5] Suganuma J,Uozumi T.基于地图匹配的自动驾驶汽车精确位置估计[J]. IEEE智能车辆研讨会,2011(4): 296–301
[6] Levinson J,Montemerlo M,Thrun S.城市环境中基于地图的精确车辆定位[M]. 剑桥: 麻省理工学院出版社,2007年
[7]郝力,纳沙比比F,图勒敏G. 通过融合单摄像机低成本GPS和地图数据进行智能车定位[J]. 智能交通系统,2010(9): 1657–1662
[8] Ress C,Etemad A,Kuck D等. 电子地平线—为ADAS应用提供数字地图数据[J]. 马德拉岛,2008(3): 40–49
[9] Sutarwala B Z. GIS,用于绘制车道级数据并实时重新创建导航[D]. 里弗赛德: 加利福尼亚大学(硕论文),2010
[10] Schreiber M,Knoppel C,Franke U. Laneloc: 使用高精度地图基于车道标记的定位[J]. IEEE Xplore,2013,36(1): 449–454
[11] Guo HZ,JI Meguro JI,Kojima Y等. 使用低成本传感器为自动驾驶汽车和高级驾驶员作为交通系统自动生成车道级地图[C]. 香港: IEEE
ICRA机器人与自动化国际会议,2014
[12] Bender P,Ziegler J,Stiller C. Lanelets: 自动驾驶的有效地图表示[J]. 智能汽车研讨会,2014(3): 420–425
[13]彭璇,王梦媛,曾洁茹等. 高精度北斗定位技术在法务执法与取证中的应用研究[J]. 电子技术应用,2017,43(4): 21-23
[14]史万生,曹健,张青,等. 边缘计算: 愿景与挑战[J]. IEEE物联网杂志,2016,3(5): 637–646
[15]石维松,孙辉,曹杰等. 边缘计算: 万物互联时代的新计算模型[J]. 计算机研究与开发,2017,54(5): 907–924
*编辑和整理: 资深分析师Laripe
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-179817-1.html
 如何才能绘制出一份高逼格的流程图呢?
如何才能绘制出一份高逼格的流程图呢? 罗马讲堂: 要了解移动电源聚合物内核,这篇文章就足够了
罗马讲堂: 要了解移动电源聚合物内核,这篇文章就足够了 2020年最新的徕卡数码相机系列
2020年最新的徕卡数码相机系列 了解如何打开dat文件
了解如何打开dat文件
一次次双降