控制点少,加密三种的高精度GPS辅助无人机研究
电脑杂谈 发布时间:2020-03-29 00:07:45 来源:网络整理
摘要: 为了解决将3D(DEM,DOM,DLG)产品与UAV图像一起使用的问题,地面控制点数量很多,并且现场工作量很大. 准确获取无人机航拍机座标坐标,然后进行GPS辅助空三加密的方法,并对该方法进行实验验证,测试结果表明,该方法可以大大减少控制点,满足空间的不同使用三种加密要求.
关键字: 无人机;全球定位系统;空格三加密;控制点少
无人机在现代测绘行业中起着越来越重要的作用,因为它们具有使用成本低,机动性灵活,负载多样,用途广泛和操作简单等优点. 使用无人机获取图像数据已成为目前获取图像数据的重要方法之一[1-3]. 无人机图像具有较小的图像尺寸,大量的照片和较小的基本高度比. 自动驾驶仪设备记录的POS数据的准确性较低. 在随后的数据处理中,需要大量的地面控制点,并且现场工作量很大. 然而,所产生结果的高度精度不足,这严重限制了无人机在实际生产中的应用. 目前,无人机采集的图像主要用于数字正射影像的制作,很少用于数字高程模型的制作和数字线描的制作.
随着计算机技术的飞速发展以及高精度GPS的小型化和普及,无人飞行器的使用实现少量地面控制点和空间三加密提供了可能性. 在无人机上加载高精度GPS设备,以在传感器拍摄时获得精确的瞬时位置,从而部分摆脱了无人机摄影测量对地面控制点的依赖性,从而大大减少了野外部署时间并减少了野外部署的难度,并且提高空间加密效率和准确性有效地改善了测绘结果的现状.
1技术流程
使用高精度GPS辅助无人机控制较少空间和三种加密的技术过程如下:
首先,在无人机上安装高精度GPS设备,以测量GPS的偏心分量;然后将修改后的无人机用于航空摄影,并获取无人机图像数据,图像拍摄时间数据和GPS移动观测数据. 与无人机航拍同时设置地面参考站,获取GPS静态观测数据;通过GPS解决方案获取准确的摄像机坐标;然后进行地面控制点的布置和测量;最后,使用不同的地面控制点布局方案对数据进行后处理,以执行GPS辅助的空间加密,以验证不同方案下空间三加密的准确性,如图1所示.
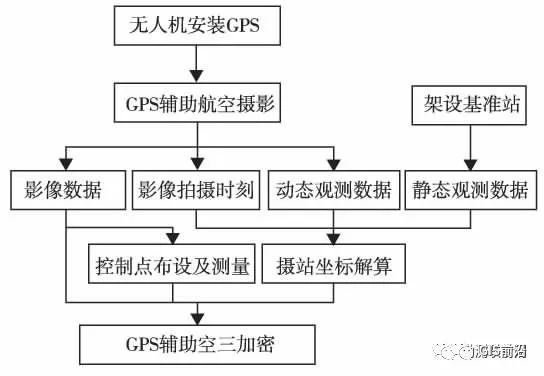
图1技术流程
2项关键技术

2. 1载波相位差技术
载波相位差技术也称为RTK(实时运动)技术. 它基于两个站载波相位的实时处理,可以实时提供观测点的三维坐标.
其定位的基本思想是: 以数据链路为传输链路,基站将获得的载波相位值及其三维坐标实时传输到用户站,然后用户进行传输从基站接收到的载波相位和GPS卫星的载波相位作为相位差观测值,然后对这些数据进行实时处理,以获得用户站的实时位置信息.
2. 2个GPS辅助的空中三角测量
GPS辅助空中三角测量的基本思想是: 使用不小于两个安装在飞机上和地面上的GPS的N(N≥1)个参考站来同时观测GPS卫星以获得连续GPS卫星数据,然后使用载波相位测量差分定位技术处理获取的卫星数据,以获得要确定的点的X,Y,Z坐标. 最后,在确保数学模型和算法一致的前提下,将获得的空间位置信息用作附加值,并使用附加值将调整添加到摄影测量局域网中. -8].
目前,GPS辅助空中三角测量有两种常见的地面控制布局方案,如图2所示.
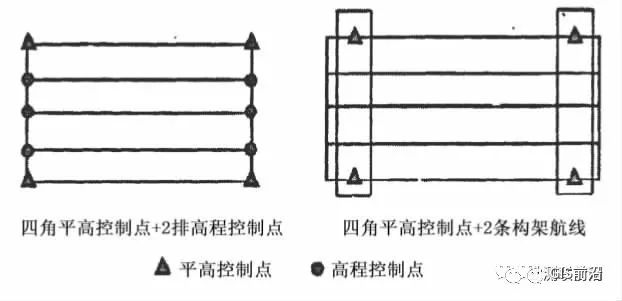
图2两种常见的地面控制方案
在传统的空中三角测量地面控制点布局方案中,经常会根据精度要求在区域网络中部署大量的控制点gps 精度 空中搜索,增加了野外作业的工作量gps 精度 空中搜索,也产生了一定的作业效率. . 另外,对于地形复杂且形成的区域网络较大的某些区域,需要铺设大量的控制点. 相比之下,这两种通用的GPS辅助空中三角测量方案显着减少了地面控制点的数量,从而缩短了测绘周期并提高了工作效率. 同时,对于地形复杂,难以测量的地区,实施航测领域的可能性也增加了.
3个实验

3. 1个实验数据
使用白银市靖远县吴家川开发区长约7公里,长约4.5公里的试验区作为试验区. 该地区地形多为丘陵,海拔1 480〜1 650 m. 约30平方公里. 使用改造后的无人机进行了航空摄影,总共飞行了1次,并获得了772幅航空摄影结果,地面分辨率为0.1 m. 地面控制点的布局是根据四个角位控制点和结构化路线的计划进行的. 总共安排了24个控制点和检查点. 每个设计点测量两个点,总共测量了49个控制点和检查点.
3. 2种空的三种加密方案
在空对空加密的调整过程中,根据无控制点,一个控制点,对角线控制点,四角控制点和稀疏控制点等各种控制点方案来调整控制点. 空的三个加密的准确性如图3所示.

图3三个空加密点的控制方案
表1清空三个加密精度检测表/ m
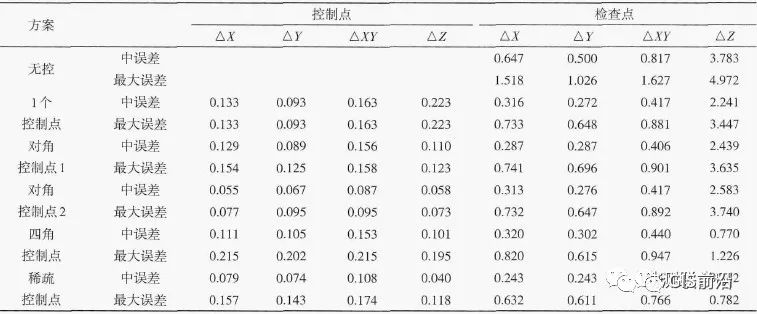
3. 3空三加密精度
空的三个加密实验都使用大量冗余控制点进行准确性验证.

(1)不受控制的方案使用49个检查点;
(2)1个控制点方案使用1个控制点和48个检查点;
(3)对角控制点方案1使用2个控制点和47个检查点;
(4)对角控制点方案2使用2个控制点和47个检查点;
(5)四角控制点方案使用4个控制点和45个检查点;
(6)稀疏控制点方案使用12个控制点和37个检查点.
3. 4关于控制点布局的讨论
根据上述不同控制点方案的三点加密精度以及不同应用所需的精度,可以得出以下应用意见.
(1)在“国家航空紧急事件能力建设”中,“在图像分辨率为0.2至0.5 m时,灾难专题图像图的精度优于7.5 m;图像分辨率优于0. 在2 m时,灾害专题图像图的精度优于4 m;灾区数字高程模型(DEM)产品的精度优于15 m,而灾区数字高程模型(DEM)的精度灾区的关键区域要比5m好.
在应急测绘支持中,可以采用无控制点的作战方案.

(2)GB / T23236-2009“空中三角测量的数字航空摄影测量规范”规定,地图比例尺为1: 1000. 在丘陵地形上绝对方向检查点的平面位置的误差为0.5 m ,高程中位误差容限为0.4 m. 0米1: 5 000,1: 10000丘陵地带绝对方向检查站仰角误差容限为1.0 m.
在大型数字高程模型和数字线图制作项目中,有必要根据稀疏控制点方案进行地面控制布局;在将基本测绘数据更新为1: 5000和1: 10000时,可以根据四个角进行控制. 点方案执行地面控制点分配.
(3)在一个控制点和两个对角控制点操作方案中,检查点的平面位置误差和高程误差基本相同.
在大型数字正射影像制作项目中,如果调查区域的四个角的地形是复杂的区域,如山脉,沙漠,森林,水域等,则不适合布置地面控制点. 任意区域布局.
3. 5地面控制点部署效率分析
基于实验区域,改造前的无人航空摄影系统用于1: 1000数字正射影像生产和数字线描生产. 数字正射影像需要7条基线,横向间隔5〜6条路线用于地面控制点布局. 数字线描生产需要根据路线设置2条基线,地面控制点可在上下方向布置,用于支路. 布局如表2所示.
表2地面控制点部署的统计表

从上表可以看出,在配备了高精度GPS设备之后,使用无人机进行项目生产可节省的野外作业量超过85%,大大提高了工作效率并节省了成本.
4结论
具有较少控制点和空间的加密的高精度GPS辅助无人机研究表明,在无人机上安装高精度GPS设备可以达到减少地面控制点和提高运营效率的目的. 采用不同的航空摄影设计和地面控制点布局方案,可以满足应急测绘支持,地形图制作以及基础测绘和更新应用的需求,大大扩大了无人机的应用范围.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-155921-1.html
 戴尔XPS 15(XPS15D-6828T)
戴尔XPS 15(XPS15D-6828T) 手机充电器维修 废旧手机去哪儿了? 新手机销量背后是大量废旧产品
手机充电器维修 废旧手机去哪儿了? 新手机销量背后是大量废旧产品 移动硬盘变为原始格式,无法格式化
移动硬盘变为原始格式,无法格式化 360云盘宣布关闭. 百度SkyDrive响应不停,但是...
360云盘宣布关闭. 百度SkyDrive响应不停,但是...
两个危机可同时化解