www.acctech.com.cn
电脑杂谈 发布时间:2020-02-05 13:01:02 来源:网络整理
姿态定位定向仪器通常是接收机内置两块GNSS板卡,其中一块根据基准站发过来的差分数据进行RTK定位并输出定位坐标,此板卡同时把原始数据发给另一块板卡,另一板卡根据两个板卡的原始数据解算出两个天线位置的方位角和俯仰角或者横滚角,从而输出角度信息。

测姿的机理也有借助差分来推动,就是用两台接收机安置在基线的两端并同步监测相同的卫星北斗定位原理,以确认基线两端在地球坐标系中的相对位置或基线向量。它之所以能提升效率,就在于它们的相关性,即借助差分技术来抵消公共误差部分。
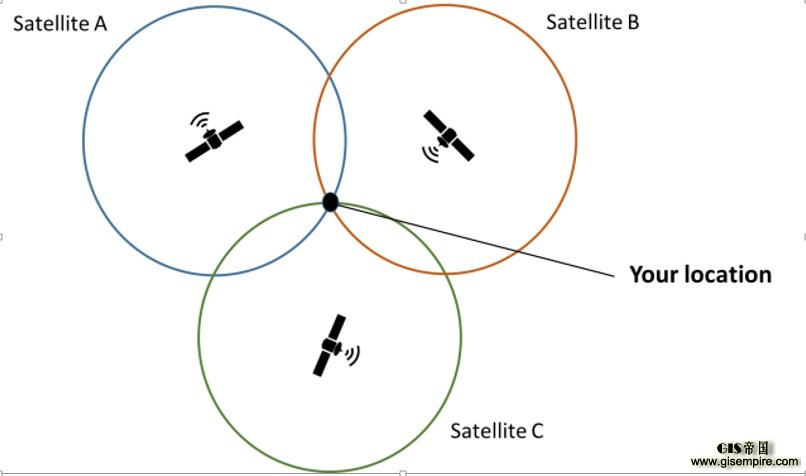


GPS北斗定位定向原理
测姿的机理如上图所示。GNSS板卡A按要求的时间间隔把修正信息发给另一个GNSS板卡B,GNSS板卡B用修正信号校正自己的检测或位置解,通过求解载波相位整周模糊度,两天线在地心地固坐标系中的相对位置可以准确的求得北斗定位原理,根据地心地固坐标系到当地水平坐标系的转化关系,即可将基线矢量转换至当地水平坐标系下,那么基线的两维姿态角就可以确认了。
一般状况下姿态定位定向应用时GNSS板卡A输出定位坐标,GNSS板卡B输出姿态角信息。而因为GNSS板卡A的定位坐标本身即使单机定位不精确,需要收到其他参考站的差分数据,所以要求GNSS板卡具有动态基站的功能。这样姿态定位定向型接收机就可以定出精确的坐标位置跟姿态角。相关产品
GPS北斗定位定向罗经
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-139704-1.html
相关阅读
发表评论 请自觉遵守互联网相关的政策法规,严禁发布、暴力、反动的言论
-

-
于少白
我更新后下载App无法下载
 只需拍照并了解手机相机的广角值
只需拍照并了解手机相机的广角值 gtp1000刷机_三星p1000最高版本_三星p1000升级4.0
gtp1000刷机_三星p1000最高版本_三星p1000升级4.0 数码相机的参数怎么看?购买时应留意哪方面?
数码相机的参数怎么看?购买时应留意哪方面? DV短片录制技巧 教学设计
DV短片录制技巧 教学设计
穷的时候谈环保奢侈