GPS期末考试试卷两套含答案
电脑杂谈 发布时间:2019-07-05 07:07:51 来源:网络整理
经营业务范围 : 销售计算机及配件、通讯设备(不含卫星地面接收和发射设备)、五金、交电、百货,计算机软件开发,计算机技术服务,制造、销售通信终端设备(不含卫星地面接收和发射设备)、电子产品(不含电子出版物)、计算机硬件gps卫星组网系统组成,货物进出口,技术进出口。), 变更后: 销售计算机及配件、通讯设备(不含卫星地面接收和发射设备)、五金、交电、百货,计算机软件开发,计算机技术服务,制造、销售通信终端设备(不含卫星地面接收和发射设备)、电子产品(不含电子出版物)、计算机硬件,货物进出口,技术进出口。变更前: 销售计算机及配件、通讯设备(不含卫星地面接收和发射设备)、五金、交电、百货,计算机软件开发,计算机技术服务,制造、销售通信终端设备(不含卫星地面接收和发射设备)、电子产品(不含电子出版物)、计算机硬件。
绕月卫星必须运行到地面控制和观测均较好的时段落月。总结:车载卫星电视天线在国内一般主要接收中星九号和亚太5号两颗卫星,这个是和天线和卫星上的参数决定的gps卫星组网系统组成,严格意义上讲,所有卫星都可以接收,前提是卫星信号覆盖场强在接收范围内就可以。车载卫星天线接收就是接收卫星传送的电视信号,只要在卫星信号有效覆盖区内,都可以有效地接收,是真正的无缝链接,这就是卫星电视的移动接收.接收卫星电视节目是一种享受,移动卫星电视接收更是最高的追求,试想一下,无论走到哪里,无论坐在车上还是船上,都能收看到实时播出的电视节目,那是多么惬意的事情啊.移动接收中天线是相对”固定”的,这是相对于接收卫星而言的,必须时刻对准卫星,才能接收到卫星电视信号,否则什么也收不到.。
a 3-4 水平角的观测 经纬仪的对中、整平和瞄准 水平角的观测 1. 测回法 当上下半测回角值差不大于±40″时:β (β左+β右)/2 06 21 240 b 18 20 60 48 00 180 a 右 36 20 60 b 60 20 21 24 20 60 12 00 0 a 左 o ″ ′ ° ″ ′ ° ″ ′ ° 备注 一测回平均值 半测回角值 水平度盘读数 目标 竖盘位置 测站 测回法水平角观测手薄 3-4 水平角的观测 经纬仪的对中、整平和瞄准 水平角的观测 1. 测回法 当测角精度要求较高时,往往要测几个测回,为了减少度盘分划误差的影响,各测回间应根据测回数n 按180°/n 变换水平度盘位置。车载卫星天线接收就是接收卫星传送的电视信号,只要在卫星信号有效覆盖区内,都可以有效地接收,是真正的无缝链接,这就是卫星电视的移动接收.接收卫星电视节目是一种享受,移动卫星电视接收更是最高的追求,试想一下,无论走到哪里,无论坐在车上还是船上,都能收看到实时播出的电视节目,那是多么惬意的事情啊.移动接收中天线是相对”固定”的,这是相对于接收卫星而言的,必须时刻对准卫星,才能接收到卫星电视信号,否则什么也收不到.。比如:法国spot卫星虽也是极地轨道卫星,轨道高度832km,轨道倾角98.7度,重复周期26天,但spot/hrv遥感器具有倾斜观测能力(倾角±。
自动跟踪是指根据地面站接收机所接收的卫星信标信号,检测出俯仰和方位误差信号,根据误差信号大小驱动天线转台系统,使天线自动对准卫星。一、与光学测量有关的人眼特性二、人眼的对准误差和调焦误差三、人眼通过光学系统观测时的对准误差四、人眼通过光学系统观测时的调焦误差。nivelco调频连续波雷达物位计在测量过程中应用了按照线性变化的高频信号(~10ghz),雷达物位计的信号从天线发出,在被测量平面反射,回波被天线接收。

1 分 五 、综合分析共 13 分 根据下列控制网的图形用三台天宝 4800 双频接收机作业相邻点的距离约 1 km 仪器迁移时间约 20-30 分钟 已知接收机的使用序号和机号如下表要求最少有三个同步观测时间为 1 小时。 测站不宜选择在山坡、山谷和盆地中; 1 分 步观测环同序号 1 机号 29191编写定位的先后次序6 分 。 2 写出三个同步观测环和一个独环。 4 分 3根据下图 PDOP 值选择每一个同步观测环最佳的观测时段。 3分 答 1观测时段 1A 点接收机 1 、B 点接收机 2 、D 点接收机 3 2 分 观测时段 2A 点接收机 1 、B 点接收机 2 、C 点接收机 32 分 观测时段 3B 点接收机 2 、C 点接收机 3 、D 点接收机 12 分 2同步观测环 观测时段 1 的 AB、BD、AD 三边所组成的闭合环 1 分 观测时段 2 的 AB、BC、AC 三边所组成的闭合环 1 分 观测时段 3 的 BC、CD、BD 三边所组成的闭合环 1 分 独立环 观测时段 1 的独立边 AB、AD 和观测时段 3 的独立边 BD 三边所组成的闭合环 1 分 没有明确写明是独立边的酌情处理 3在这三个时间段内选择较好 观测时段 1 500 - 6001 分 观测时段 2 1330- 14301 分 观测时段 3 1800 - 19001 分立 2 3 2930 5306GPS 测量 试卷 B 卷一、填空每空 0.5 分共 10 分1、卫星定位中常采用空间直角坐标系及其相应的大地坐标系一般取地球质心为坐标系原点。
2、我国目前常采用的两个国家坐标系是 1954 年北京坐标系和 1980年国家大地坐标系 。 3、GPS 接收机的天线类型主要有单板天线、 四螺旋形天线、利用双频技术可以消除或减弱对流层折射对观测量的影响所以定位精度较高基线长度不受限制所以作业效率较高。二、名词解释每题 3 分共 18 分1、WGS-84 大地坐标系原点位于地球质心Z 轴指向 BIH1984.0定义的协议地球极CTP方向X 轴指向 BIH1984.0 定义的零子午面和 CTP 赤道的交点Y 轴与 Z、X 轴构成右手坐标系。

toa测量要求ms的发射与所有bts的接收精确同步(1μs的定位误差将导致300m的定位误差),并且在其发射信号中要包含发射时间标记以便接收基站信号到达时间确定信号所传播的距离。功能方面,支持同步接收美国gps和glonass卫星定位系统,结合wi-fi、基站、重力感应,共五方信号定位。其中rtk模式的工作原理,就是在已知高等级点上安置接收机为参考站,对卫星进行连续观测,并将其观测数据和测站信息,通过传输设备,实时地发送给流动站,流动站gps根据相对定位的原理,实时解算出流动站的三维坐标。
载波频率为 1575.42MHz 和 1227.60MHz(2 分)。 2、简述卫星的受摄运动及其主要摄动力。 答考虑了摄动力作用的卫星运动称为卫星的受摄运动(2 分)。主要的摄动力有日月引力(1 分)地球潮汐作用力(1 分)太阳辐射压力(1 分)大气阻力(1 分)。 3、简述动态定位的作业方法。 答建立一个基准站安置接收机连续跟踪所有可见卫星 (2 分)流动站接收机先在出发点上静态观测数分钟 然后流动站接收机从出发点开始连续运动(2 分)按指定的时间和间隔自动测定运动载体的实体位置(2 分)。 4、如何减弱 GPS 接收机钟差。 答把每个观测时刻的接收机钟差当作一个独立的未知数在数据处 理中与观测站的位置参数一并求解。(2 分)认为各观测时刻的接收机钟差间是相关的像卫星钟那样将接收机钟差表示为时间多项式并在观测量的平差计算中求解多项式的系数。此法可大大减少未知数其成功与否关键在与钟误差模型的有效程度。(2 分)通过在卫星间求一次差来消除接收机的钟差。(2 分) 5、试说明载波相位观测值的组成部分。 答完整的载波相位观测值是由三部分组成的即载波相位在起始时N(2 分)和从某一起始时刻至观测时刻之间载波相位变化的整周数相位差非整周的小数部分6、简述 GPS 卫星的主要作用。

可以接收卫星(gps、glonas、北斗星)时间信号、国家授时中心bpl长波授时信号,或者接收外部irig-b码,并采用fpga完成先进的“时间驯服算法”,由高精度的卫星脉冲对本地守时脉冲进行驯服,从而实现高精度的守时功能。 7)下行dpch信道介绍 wcdma空中接口信道 对于速率为60kbps的数字信号进行信道化(扩频)操作 上行需要的扩频码为64 下行需要的扩频码为128 由于上下行信道映射方式不同 7)下行dpch信道介绍 wcdma空中接口信道 目 录 wcdma网络结构和频率 wcdma无线技术原理 wcdma空中接口信道 1 2 3 wcdma关键技术介绍 4 wcdma相关指标介绍 5 1)rake接收 2)功率控制 3)呼吸效应 4)软容量 5)导频污染 6)软切换 7) 硬切换 8)小区同步过程 wcdma关键技术介绍 rake 接收技术有效地克服多径干扰,提高接收性能 接收机 单径接收电路 单径接收电路 单径接收电路 搜索器 计算信号强度与时延 合 并 合并后的信号 t t s(t) s(t) 1) rake接收 wcdma关键技术介绍 接收 发射 coding 直射信号 反射信号 如果时间差 < 1 码片长度 decoding 直射信号 反射信号 发射 接收r 如果时间差 > 1 码片长度 coding decoding 1) rake接收 wcdma关键技术介绍 pl1 pl2 l1 >> l2 。3、极化角:目前我们所能收视的卫星电视信号大多采用所谓的线极化方式传送,可以在同一个转发器中传送两个相互垂直且互不影响的两个信号,通常这两个方向为水平(h)和垂直(v)两个方向,由于位于赤道上空的卫星经度与接收地经度一般并不相同,所以卫星发出的水平或垂直极化波到达接收地后极化方向会发生变化,所变化的角度即是所谓的极化角.通常采用的双极化高频头即与此对应,所以在接收不同的卫星时,要转动lnb,即改变极化角以取得最佳的信号.举例讲,欲接收东经76.5度亚太2r某转发器的水平极化信号,在苏州的极化角约为45度,原本高频头上的零刻度应与高频头夹子上的零刻度重合,此时就应将高频头逆时针转过45度(面向锅),此时高频头信号引出线呈水平向右的状态.若接收卫星经度大于接收地经度,则旋转方向变成顺时针。
(2 分) 2GPS 网一般应通过独立观测边构成闭合图形例如一个或若干个独立观测环或者附合路线形式以增加检核条件提高网的可靠性。(2 分) 3GPS 网内点与点之间虽不要求通视但应有利于按常规测量方法进行加密控制时应用。(2 分) 4可能条件下新布设的 GPS 网应与附近已有的 GPS 点进行联测新布设的 GPS 网点应尽量与地面原有控制网点相联接联接处刻沿传播路径延迟的整周数0( )Int (2 分)以及接收机所能测定的载波( )Fr (2 分)。 1 2 3 4 6 5的重合点数不应少于三个且分布均匀以便可靠地确定 GPS 网与原有网之间的转换参数。(2 分) 5GPS 网点应利用已有水准点联测高程。(2 分) 五 、综合分析共 16 分 根据下列控制网的图形用三台天宝 4800 双频 GPS 接收机作业相临点之间的距离约 1 km仪器迁移时间约 20~30 分钟同步观测时间为 1 小时 已知接收机的使用序号和天线编号如下表试编写 GPS作业调度表。 序 号 1 2 3 ①根据右图编写定位的先后次序。 ②根据下图 PDOP 值选择最佳的观测时段 填入 GPS 作业调度表中。
5、观测方法 ⑴、 每次变形观测时, 固定观测人员采用相同仪器和设备, 用相同的图形 (观 测路线)和观测方法,且作业环境、气象条件基本相同。 3-4 水平角的观测 经纬仪的对中、整平和瞄准 水平角的观测 1. 测回法 2. 方向法(全圆测回法) 适用于观测两个以上的方向(一次观测多个角) 当方向多于三个时,每半测回都从一个选定的起始方向(零方向)开始观测,在依次观测所需的各个目标之后,应再次观测起始方向(称为归零) a。 a 3-4 水平角的观测 经纬仪的对中、整平和瞄准 水平角的观测 1. 测回法 当上下半测回角值差不大于±40″时:β (β左+β右)/2 06 21 240 b 18 20 60 48 00 180 a 右 36 20 60 b 60 20 21 24 20 60 12 00 0 a 左 o ″ ′ ° ″ ′ ° ″ ′ ° 备注 一测回平均值 半测回角值 水平度盘读数 目标 竖盘位置 测站 测回法水平角观测手薄 3-4 水平角的观测 经纬仪的对中、整平和瞄准 水平角的观测 1. 测回法 当测角精度要求较高时,往往要测几个测回,为了减少度盘分划误差的影响,各测回间应根据测回数n 按180°/n 变换水平度盘位置。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shumachanpin/article-110598-1.html
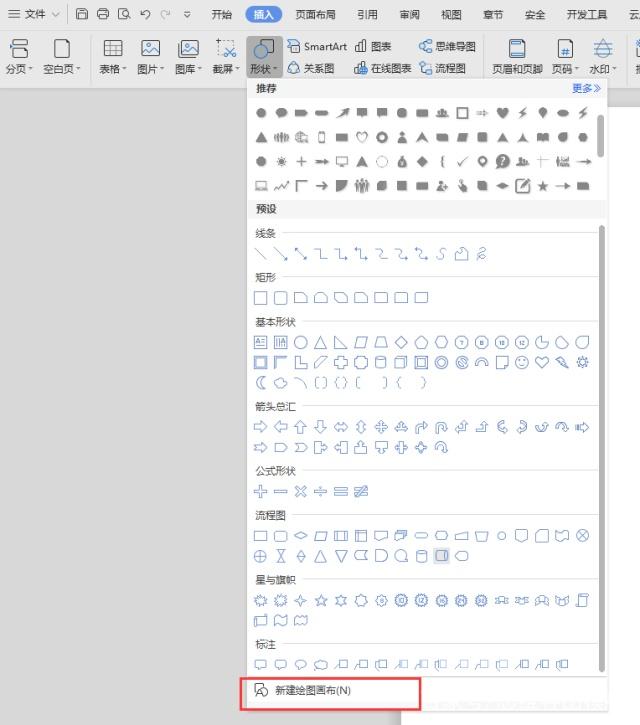 如何才能绘制出一份高逼格的流程图呢?
如何才能绘制出一份高逼格的流程图呢? 罗马讲堂: 要了解移动电源聚合物内核,这篇文章就足够了
罗马讲堂: 要了解移动电源聚合物内核,这篇文章就足够了 2020年最新的徕卡数码相机系列
2020年最新的徕卡数码相机系列 了解如何打开dat文件
了解如何打开dat文件
美国人说