floyd算法 矩阵 理解_floyd算法的概念模型_探求Floyd算法的动态规划本质(2)
电脑杂谈 发布时间:2016-06-03 12:00:04 来源:网络整理那如何利用一个二维数组来实现滚动数组,以减小空间复杂度呢?
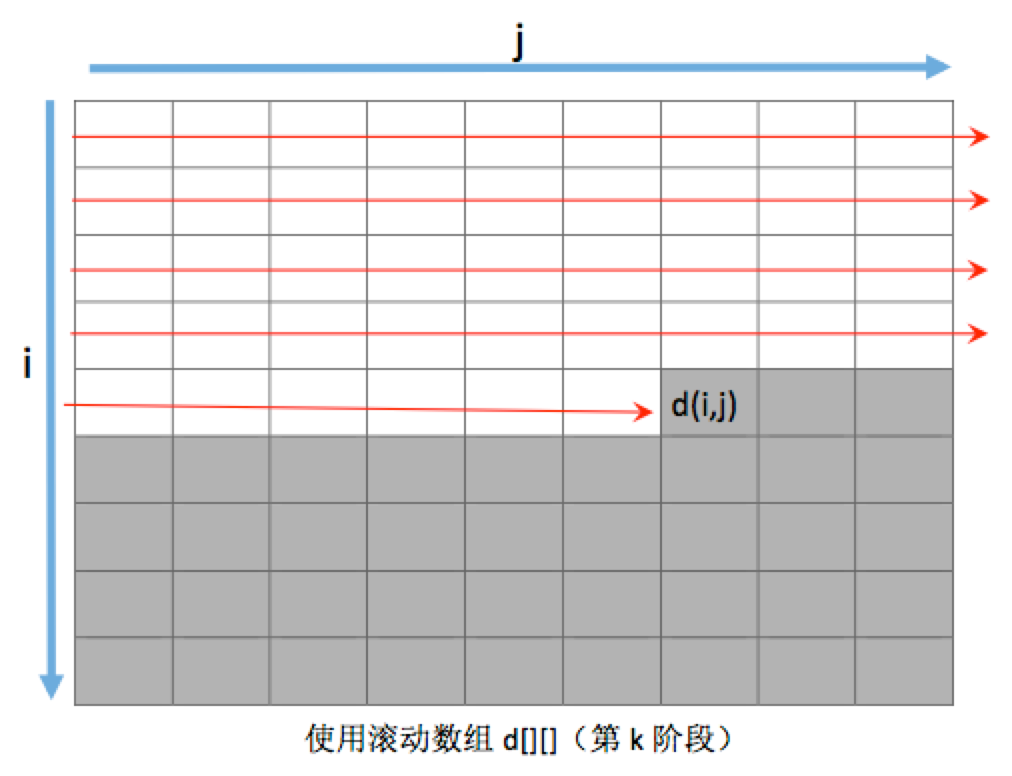
上图是使用滚动数组,在第k阶段,计算d[i][j]时的情况。此时,由于使用d[][]这个二维数组作为滚动数组,在各个阶段的计算中被重复使用,因此数组中表示阶段的那一维也被取消了。在这图中,白色的格子,代表最新被计算过的元素(即第k阶段的新值),而灰色的格子中的元素值,其实保存的还是上一阶段(即第k-1阶段)的旧值。因此,在新的d[i][j]还未被计算出来时,d[i][j]中保存的值其实就对应之前没有用滚动数组时d[k-1][i][j]的值。此时,动态转移方程在隐藏掉阶段索引后就变为:
d[i][j] = min(d[i][j], d[i][k]+d[k][j])(k,i,j∈[1,n])
赋值号左侧d[i][j]就是我们要计算的第k阶段是i和j之间的最短路径长度。在这里,需要确保赋值号右侧的d[i][j], d[i][k]和d[k][j]的值是上一阶段(k-1阶段)的值。前面已经分析过了,在新的d[i][j]算出之前,d[i][j]元素保留的值的确就是上一阶段的旧值。但至于d[i][k]和d[k][j]呢?我们无法确定这两个元素是落在白色区域(新值)还是灰色区域(旧值)。好在有这样一条重要的性质,dp[k-1][i][k]和dp[k-1][k][j]是不会在第k阶段改变大小的。也就是说,凡是和k节点相连的边,在第k阶段的值都不会变。如何简单证明呢?我们可以把j=k代入之前的d[k][i][j]=min(d[k-1][i][j], d[k-1][i][k]+d[k-1][k][j])方程中,即:
d[k][i][k]
= min(d[k-1][i][k], d[k-1][i][k]+d[k-1][k][k])
= min(d[k-1][i][k], d[k-1][i][k]+0)
= d[k-1][i][k]
也就是说在第k-1阶段和第k阶段,点i和点k之间的最短路径长度是不变的。相同可以证明,在这两个阶段中,点k和点j之间的的最短路径长度也是不变的。因此,对于使用滚动数组的转移方程d[i][j] = min(d[i][j], d[i][k]+d[k][j])来说,赋值号右侧的d[i][j], d[i][k]和d[k][j]的值都是上一阶段(k-1阶段)的值,可以放心地被用来计算第k阶段时d[i][j]的值。
利用滚动数组改写后的floyd算法代码如下:
1
2
3
4
5
6
void floyd() {
for(int k = 1; k <= n; k++)
for(int i = 1; i <= n; i++)
for(int j = 1; j <= n; j++)
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
因此,通过这篇文章的分析,我们可以发现,Floyd算法的的确确是一种典型的动态规划算法;理解floyd算法,也可以帮助我们进一步理解动态规划思想。
转载?p=81
以上就是关于floyd算法的全部内容,相信你一定会非常满意。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/shenmilingyu/article-7522-2.html
 如何在计算机上安装独立显卡|如何在计算机上安装独立显卡
如何在计算机上安装独立显卡|如何在计算机上安装独立显卡
 计算机丢失shlwapi.dll?没有找到shlwapi.dll?shlwapi.dll下载 找不到shlwapi.dl
计算机丢失shlwapi.dll?没有找到shlwapi.dll?shlwapi.dll下载 找不到shlwapi.dl 小度陪你报志愿_小度机器人咨询助高考学子报志愿 被称神器
小度陪你报志愿_小度机器人咨询助高考学子报志愿 被称神器 ibm r50e 拆机图解?03年ibmr50e笔记本?IBM R50e笔记本Dothan配置6899元
ibm r50e 拆机图解?03年ibmr50e笔记本?IBM R50e笔记本Dothan配置6899元
这个认真努力不骄不躁的“老”演员