Canny边缘检测算法的步骤和理解
电脑杂谈 发布时间:2020-06-29 02:11:04 来源:网络整理
【Embedded Cow Guide】: 本文主要介绍Canny图像边缘检测算法的步骤以及对每个步骤的理解
[嵌入式牛鼻子]: 边缘检测,Canny,台阶
[嵌入式问题]: Canny边缘检测算法的步骤是什么?

[嵌入牛的文字]:
1. Canny边缘检测算法的建议和指标
Canny算法由JohnCanny于1986年提出,当时JohnCanny 28岁,该文章发表在PAMI的顶级期刊上(1986年. IEEETransactions on Pattern Analysis and Machine Intelligence,第8卷,1986年,第679页) -698).

Canny运算符类似于Marr(LoG)边缘检测方法(Marr叔叔是计算机视觉的父亲),并且属于平滑然后计算导数的方法. JohnCanny研究了最佳边缘检测方法的特征,并给出了三个评估边缘检测性能的指标:
(1)良好的信噪比意味着将非边缘点确定为边缘点的可能性较低,而将边缘点确定为非边缘点的可能性较低;
(2)定位性能高,即检测到的边缘点应尽可能靠近实际边缘的中心;
(3)对单个边缘只有唯一的响应,即单个边缘生成多个响应的可能性很低,应最大程度地抑制虚假响应边缘.
总而言之,希望在提高对场景边缘的灵敏度的同时,可以抑制噪声的方法是一种很好的边缘提取方法.
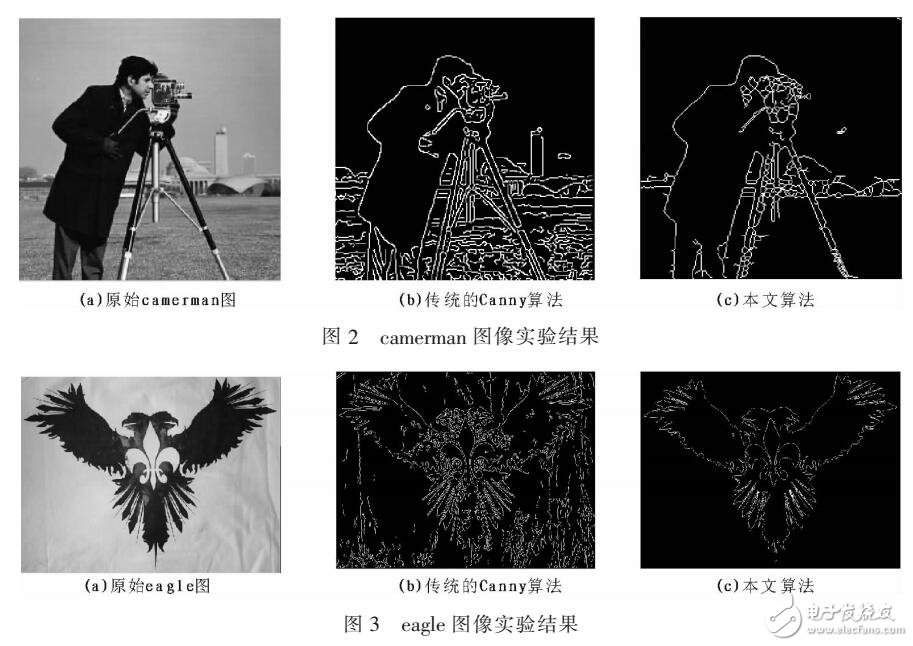
2. Canny边缘检测算法的步骤:

(1)图像高斯滤波以降低噪声.
(2)使用一阶偏导数的有限差分来计算梯度的大小和方向.
(3)梯度幅度的非最大抑制.
(4)使用双阈值算法检测和连接边缘.
3. 对Canny边缘检测算法的普遍理解
Canny算法的目的是边缘检测. 什么是边缘?对于灰度级图像,图像局部区域的亮度显着变化的部分,即灰度值具有显着变化,即小缓冲区中灰度值的急剧变化另一个灰度差异的区域是较大的灰度值. 那么如何表征这种灰度值变化呢?这里想到的是微分微分. 导数表示变化率,但是数字图像都是离散的,也就是说,导数一定会被差异替代. 也就是说,在特定算法的步骤2中,相邻像素之间的差异用于计算梯度的大小和方向. 但是canny边缘检测处理算法比较,在真实图像中,通常会存在噪声,这会影响梯度计算,因此应该首先对步骤1进行滤波. 从理论上讲,图像梯度幅度的元素值越大,图像中该点的梯度值就越大,但这并不意味着该点是边缘. 在Canny算法中,步骤3的非最大值抑制是边缘检测的重要步骤. 从普遍意义上讲,它是指沿着梯度方向找到像素的局部最大值,比较其前后的梯度值. 如果该值是局部最大值,则可能是保留的边缘像素,否则将被抑制. 步骤4是典型的算法. 有时我们不能全部完成,也就是说canny边缘检测处理算法比较,所有阈值都是边缘点,但是设置了两个阈值,希望高低阈值之间的点也可以是边缘点,这些点最好在附近高阈值边缘点的扩展,即这些中间阈值点是高阈值边缘点的扩展. 因此,步骤4使用双重阈值来检测和连接边缘. 双阈值有时也称为滞后阈值.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/jisuanjixue/article-261837-1.html
 qualify sample什么意思_qualify for_sample是什么意思
qualify sample什么意思_qualify for_sample是什么意思 关于数字城市管理的一些思考
关于数字城市管理的一些思考 霍夫曼树加权路径长度,证明简单的方法
霍夫曼树加权路径长度,证明简单的方法 如何根据选股技巧选择股市中的领先股票
如何根据选股技巧选择股市中的领先股票
那你们下场一定会很悲惨