基于python的自适应阈值的Canny边缘检测
电脑杂谈 发布时间:2020-04-14 03:13:02 来源:网络整理
canny边缘检测的接口在opencv中给出,直接调用:
ret = cv2.canny(img,t1,t2)
您可以获取边缘检测结果. 其中,t1,t2是需要手动设置的阈值. 许多文献研究了自动阈值设置方法,即该算法可以在运行过程中自适应地找到更好的分割阈值t1改进的自适应阈值canny边缘检测,t2,但是缺少开源代码,尤其是基于python3的开源代码.
本文基于python3,并复制了一种自适应阈值分割方法.

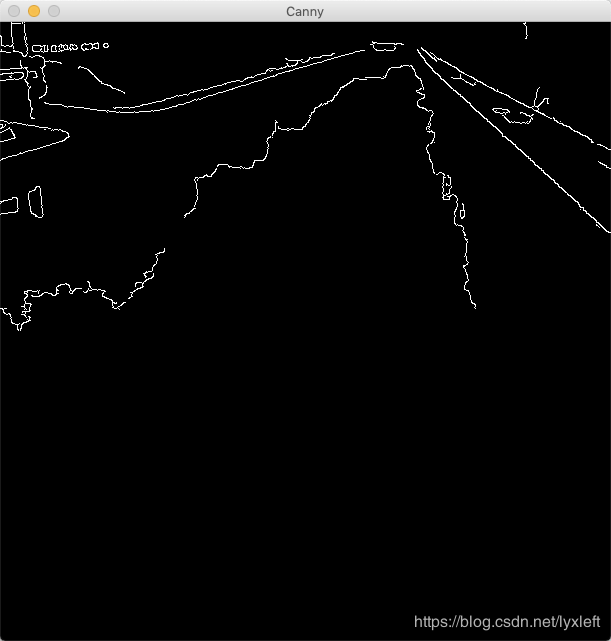
输入图片为:

输出结果的比较如下: 左图直接使用canny,右图使用本文程序进行自适应分割.

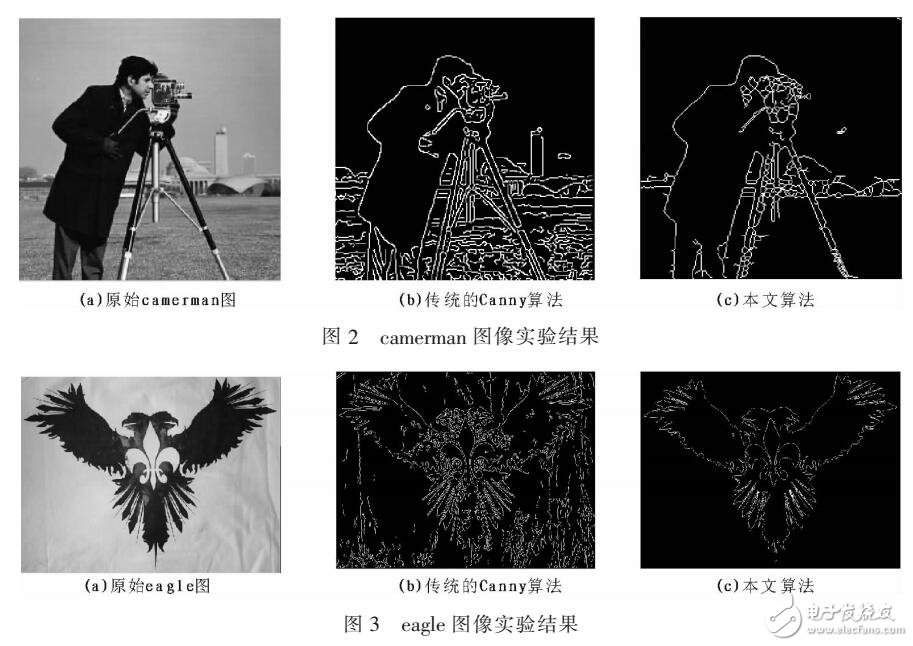
缺点是它是自下而上重写的改进的自适应阈值canny边缘检测,包括非最大抑制之类的过程. . 消耗能量需要很长时间. 上面的输入图像需要27.38s. 我不知道其他学者如何研究自适应阈值Canny边缘检测方法的耗时情况. . 下采样已在程序的预处理过程中完成. 如果没有下采样,则将花费更长的时间.
以下代码:
主程序. py:

import numpy as np
import cv2, time, math
from scipy.signal import convolve2d as conv2
from matplotlib import pyplot as plt
from bilateralfilt import bilatfilt
from dog import deroGauss
import time
#...........................................................................................
def get_edges(I,sd):
dim = I.shape
Idog2d = np.zeros((nang,dim[0],dim[1]))
for i in range(nang):
dog2d = deroGauss(5,sd,angles[i])
Idog2dtemp = abs(conv2(I,dog2d,mode='same',boundary='fill'))
Idog2dtemp[Idog2dtemp<0]=0
Idog2d[i,:,:] = Idog2dtemp
return Idog2d
#...........................................................................................
def nonmaxsup(I,gradang):
dim = I.shape
Inms = np.zeros(dim)
xshift = int(np.round(math.cos(gradang*np.pi/180)))
yshift = int(np.round(math.sin(gradang*np.pi/180)))
Ipad = np.pad(I,(1,),'constant',constant_values = (0,0))
for r in range(1,dim[0]+1):
for c in range(1,dim[1]+1):
maggrad = [Ipad[r-xshift,c-yshift],Ipad[r,c],Ipad[r+xshift,c+yshift]]
if Ipad[r,c] == np.max(maggrad):
Inms[r-1,c-1] = Ipad[r,c]
return Inms
#...........................................................................................
def calc_sigt(I,threshval):
M,N = I.shape
ulim = np.uint8(np.max(I))
N1 = np.count_nonzero(I>threshval)
N2 = np.count_nonzero(I<=threshval)
w1 = np.float64(N1)/(M*N)
w2 = np.float64(N2)/(M*N)
#print N1,N2,w1,w2
try:
u1 = np.sum(i*np.count_nonzero(np.multiply(I>i-0.5,I<=i+0.5))/N1 for i in range(threshval+1,ulim))
u2 = np.sum(i*np.count_nonzero(np.multiply(I>i-0.5,I<=i+0.5))/N2 for i in range(threshval+1))
uT = u1*w1+u2*w2
sigt = w1*w2*(u1-u2)**2
#print u1,u2,uT,sigt
except:
return 0
return sigt
#...........................................................................................
def get_threshold(I):
max_sigt = 0
opt_t = 0
ulim = np.uint8(np.max(I))
print(ulim)
for t in range(ulim+1):
sigt = calc_sigt(I,t)
#print t, sigt
if sigt > max_sigt:
max_sigt = sigt
opt_t = t
print ('optimal high threshold: ',opt_t)
return opt_t
#...........................................................................................
def threshold(I,uth):
lth = uth/2.5
Ith = np.zeros(I.shape)
Ith[I>=uth] = 255
Ith[I<lth] = 0
Ith[np.multiply(I>=lth, I<uth)] = 100
return Ith
#...........................................................................................
def hysteresis(I):
r,c = I.shape
#xshift = int(np.round(math.cos(gradang*np.pi/180)))
#yshift = int(np.round(math.sin(gradang*np.pi/180)))
Ipad = np.pad(I,(1,),'edge')
c255 = np.count_nonzero(Ipad==255)
imgchange = True
for i in range(1,r+1):
for j in range(1,c+1):
if Ipad[i,j] == 100:
#if Ipad[i-xshift,j+yshift]==255 or Ipad[i+xshift,j-yshift]==255:
if np.count_nonzero(Ipad[r-1:r+1,c-1:c+1]==255)>0:
Ipad[i,j] = 255
else:
Ipad[i,j] = 0
Ih = Ipad[1:r+1,1:c+1]
return Ih
#...........................................................................................
#Reading the image
img = cv2.imread('img0030.jpg')
while img.shape[0] > 1100 or img.shape[1] > 1100:
img = cv2.resize(img,None, fx=0.5,fy=0.5,interpolation = cv2.INTER_AREA)
#tic = time.time()
gimg = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
dim = img.shape
#...........................................................................................
#Bilateral filtering
print ('Bilateral filtering...\n')
gimg = bilatfilt(gimg,5,3,10)
print ('after bilat: ',np.max(gimg),'\n')
#...........................................................................................
stime = time.time()
angles = [0,45,90,135]
nang = len(angles)
#...........................................................................................
#Gradient of Image
print ('Calculating Gradient...\n')
img_edges = get_edges(gimg,2)
print ('after gradient: ',np.max(img_edges),'\n')
#...........................................................................................
#Non-max suppression
print ('Suppressing Non-maximas...\n')
for n in range(nang):
img_edges[n,:,:] = nonmaxsup(img_edges[n,:,:],angles[n])
print ('after nms: ', np.max(img_edges))
img_edge = np.max(img_edges,axis=0)
lim = np.uint8(np.max(img_edge))
plt.imshow(img_edge)
plt.show()
#...........................................................................................
#Converting to uint8
#img_edges_uint8 = np.uint8(img_edges)
#...........................................................................................
#Thresholding
print ('Calculating Threshold...\n')
th = get_threshold(gimg)
the = get_threshold(img_edge)
#...........................................................................................
print ('\nThresholding...\n')
img_edge = threshold(img_edge, the*0.25)
#cv2.imshow('afterthe',img_edge)
#...........................................................................................
#Hysteresis
print ('Applying Hysteresis...\n')
#for i in xrange(nang):
img_edge = nonmaxsup(hysteresis(img_edge),90)
#...........................................................................................
#img_edge = np.max(img_edges,axis=0)
#...........................................................................................
#OpenCV Canny Function
img_canny = cv2.Canny(np.uint8(gimg),th/3,th)
#toc = time.time()
#print('自适应耗时:',toc-tic)
cv2.imshow('Uncanny',img_edge)
cv2.imshow('Canny',img_canny)
print( 'Time taken :: ', str(time.time()-stime)+' seconds...')
cv2.waitKey(0)
dog.py:
import numpy as np
import math
#Oriented Odd Symmetric Gaussian Filter :: First Derivative of Gaussian
def deroGauss(w=5,s=1,angle=0):
wlim = (w-1)/2
y,x = np.meshgrid(np.arange(-wlim,wlim+1),np.arange(-wlim,wlim+1))
G = np.exp(-np.sum((np.square(x),np.square(y)),axis=0)/(2*np.float64(s)**2))
G = G/np.sum(G)
dGdx = -np.multiply(x,G)/np.float64(s)**2
dGdy = -np.multiply(y,G)/np.float64(s)**2
angle = angle*math.pi/180 #converting to radians
dog = math.cos(angle)*dGdx + math.sin(angle)*dGdy
return dog
bilateralfilt.py:

import numpy as np
#import cv2, time
def bilatfilt(I,w,sd,sr):
dim = I.shape
Iout= np.zeros(dim)
#If the window is 5X5 then w = 5
wlim = (w-1)//2
y,x = np.meshgrid(np.arange(-wlim,wlim+1),np.arange(-wlim,wlim+1))
#Geometric closeness
g = np.exp(-np.sum((np.square(x),np.square(y)),axis=0)/(2*(np.float64(sd)**2)))
#Photometric Similarity
Ipad = np.pad(I,(wlim,),'edge')
for r in range(wlim,dim[0]+wlim):
for c in range(wlim,dim[1]+wlim):
Ix = Ipad[r-wlim:r+wlim+1,c-wlim:c+wlim+1]
s = np.exp(-np.square(Ix-Ipad[r,c])/(2*(np.float64(sr)**2)))
k = np.multiply(g,s)
Iout[r-wlim,c-wlim] = np.sum(np.multiply(k,Ix))/np.sum(k)
return Iout

参考:
(Canny具有基于python2的自适应阈值,有些地方会报告错误)
算法细节,您可以搜索以查看相关文献.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/jisuanjixue/article-174876-1.html
相关阅读
发表评论 请自觉遵守互联网相关的政策法规,严禁发布、暴力、反动的言论
-

-
赵眘
里有一句话
每日福利
 serverlet_serverlet配置_jsp serverlet
serverlet_serverlet配置_jsp serverlet Java反射机制详解
Java反射机制详解 神威太湖之光跑分_神威蓝光超级计算机_神威太湖之光
神威太湖之光跑分_神威蓝光超级计算机_神威太湖之光 外国媒体已将历史上10种最恶意的计算机病毒评为
外国媒体已将历史上10种最恶意的计算机病毒评为热点图片
简单处理