对精明的操作员边缘检测的简单理解_哪些行为被视为边缘行为_它们是否困了?
电脑杂谈 发布时间:2020-03-20 11:08:28 来源:网络整理
边缘是指图像中像素值突然变化的地方.
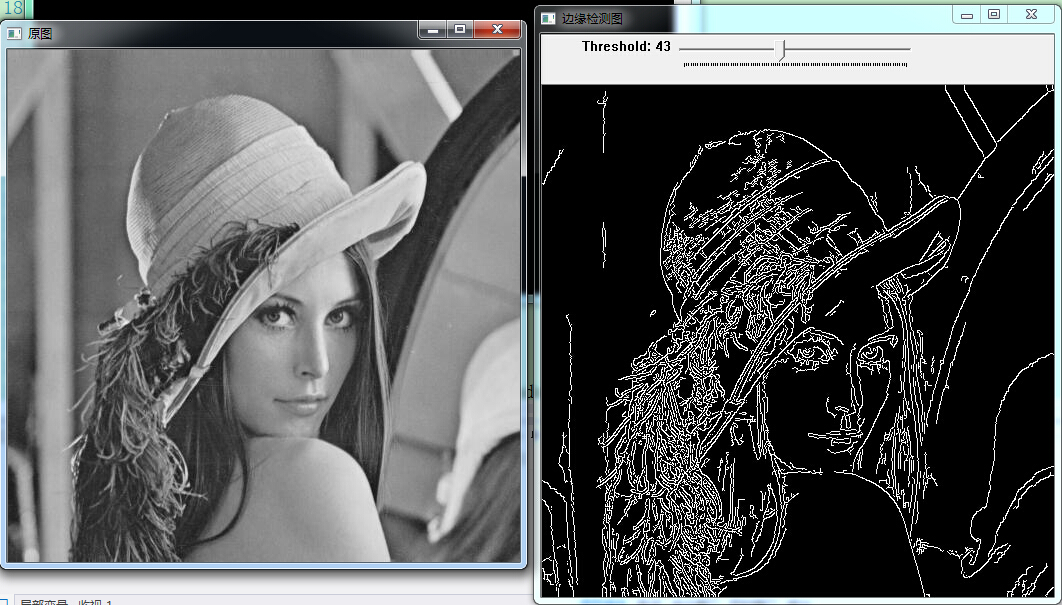
边缘检测通常分为三个步骤: 过滤,增强和检测. 基本原理是使用高斯滤波器进行降噪,然后使用卷积核找到像素梯度. 共有三种常用算法: canny运算符,sobel运算符和laplacian运算符.

Sobel算子: 引入局部平均运算的一阶导数算子,对噪声具有平滑效果,抗噪能力强,计算量大,但定位精度不高,所得边缘比较厚,适合精度要求不高的场合.

拉普拉斯算子: 一个二阶微分算子,具有旋转不变性,并且容易受到噪声的影响. 它无法检测边缘的方向. 通常canny算子边缘检测的简单理解,它不用于检测边缘,而是用于确定明暗的变化. 该运算符很少用于检测边缘,但用于确定边缘像素是图像的亮区域还是暗区域.

canny运算符: 一种完善的边缘检测算法,强大的抗噪能力,使用高斯滤波对图像进行平滑处理,使用一阶偏导数的有限差分来计算梯度的大小和方向,并使非最大化梯度幅度值抑制,使用双阈值检测和连接边缘. 优点是使用两个不同的阈值分别检测强边缘和弱边缘,并且仅当弱边缘和强边缘连接时,弱边缘才包含在输出图像中.
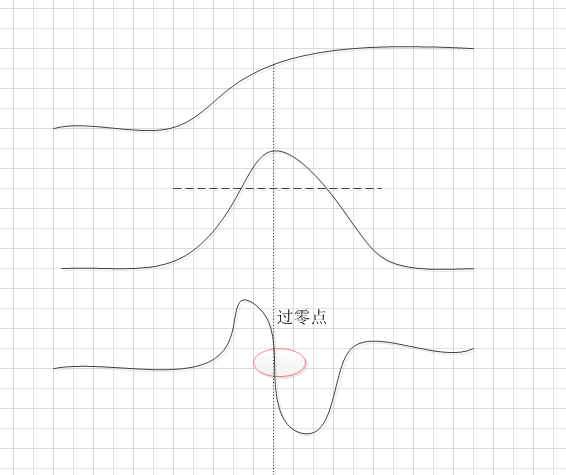
在某些情况下,例如灰度变化均匀的图像,可能仅使用一阶导数无法找到边界. 此时,二阶导数可以提供有用的信息. 二阶导数对噪声也更敏感. 解决方案是先使图像平滑,去除一些噪点,然后执行边缘检测. 但是canny算子边缘检测的简单理解,使用二阶导数信息的算法基于零交叉检测,因此获得的边缘点数量相对较少,有利于后续的处理和识别.
1. 边缘检测算法及其优缺点
2
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/jisuanjixue/article-145929-1.html
-

-
邓映鑫
易烊千玺很棒
-
马玉薇
这才是真正需要注意的地方
-
-
武文培
现在陡降存款利息真苦了这类人
 jsp / html编辑器插件支持eclipse3.x和4.x版本
jsp / html编辑器插件支持eclipse3.x和4.x版本 常见的信息安全威胁和攻击有哪些
常见的信息安全威胁和攻击有哪些 spring aop advice事务_spring aop事务的含义_spring aop事务
spring aop advice事务_spring aop事务的含义_spring aop事务 社区智能IP广播背景音乐系统解决方案
社区智能IP广播背景音乐系统解决方案
声名完