具有自动驾驶系统的多模式智能电动扫地机(2)
电脑杂谈 发布时间:2020-07-11 05:13:04 来源:网络整理[0040]附图说明附图说明图1是本发明的多模式智能电清扫车的. [0045]本发明涉及具有自动驾驶系统的多模式智能电动清洁车. 如图1所示. 如图1所示,该电动清洁车包括车身1,底盘,车轮2,前端清洁装置3和传感器装置. 清洁装置3固定在车身1的前侧的下部位置,并且前端清洁装置3包括竖立在车身1的前侧下方的碰撞支架301. 滚刷(未示出) (在图中)固定在碰撞支架301的底部(如图所示). 感测装置设置在车身1上,并且包括激光雷达4,单眼照相机5,GPS天线6和超声雷达7. 激光雷达4设置在防撞支架301的两端,并且激光雷达4设置在防撞支架301的两端. 用来感知前方的低障碍. 单眼相机5直接设置在车身1的前方,用于获取前方道路状况的信息.
GPS天线6设置在车身1的顶部,并且用于接收卫星信号以定位或操纵电动扫地机. 超声波雷达7布置在车身1周围并且用于感测周围的障碍物. [0046]车身1设置有自动驾驶系统,该自动驾驶系统包括智能驾驶大脑系统,底层的线控底盘系统,线控扫地系统和远程监视系统. 整个系统架构如图2所示. 底线控制底盘系统,线控制清洁系统,系统和智能驾驶大脑系统分别连接. [0047]智能驾驶大脑系统包括智能感知和控制子系统,连接到智能感知和控制子系统的高精度定位和导航子系统,多级避免碰撞控制子系统以及清洁区域映射子系统. 高精度定位导航子系统,多级防撞控制子系统和清洁区域映射子系统按顺序连接. 手册3/5第6CN 109828581 A6 [0048]高精度定位和导航子系统与其他三个子系统相连,这三个子系统由GPS天线6,惯性测量单元,差分信号等组成;扫描面积测绘子系统和高精度定位和导航子系统,智能感知和控制子系统系统是分开连接的. 智能感知控制子系统分别与其他三个子系统相连,多层防撞控制子系统分别与高精度定位导航子系统和智能感知控制子系统系统相连. [0049]智能感知和控制子系统包括激光雷达4,超声雷达7,单眼相机5和车载控制器,用于通过融合激光雷达4,超声雷达7和单眼相机5的感知信息来融合感知信息. . ,实时感知清洁车辆周围特定区域(主要包括行人和车辆)中的障碍物信息,同时识别道路信息(包括车道线,路边边界,交通信号灯等),以提供可清洁的清洁区域对该区域内的车辆进行实时清洁轨迹规划,并根据不同的任务模式在清洁车上做出行为模式决策,并通过控制底盘执行器和清洁执行器来跟踪清洁轨迹,以完成自动清洁任务.
[0050]优选地,两个激光雷达4使用十六行机械激光雷达位于扫地机前部的两侧,测量范围为0.02m至100m,垂直视角为±15° ,垂直视角分辨率为2°,水平视角分辨率为360°,水平视角分辨率为0.4°. [0051]单眼相机5位于清扫车前方的中间位置,并且使用1080P,150度广角微失真相机. [0052]围绕扫除器的超声雷达7的数量至少为12,检测范围为0.3m-3m,波束角为±40度. [0053]优选地,GPS天线6采用双天线,定位精度在10cm以内. [0054]清洁区域测绘子系统包括激光雷达4和用于对激光雷达4所获取的信息进行内部地图定位的计算机. 该计算机使用所获取的激光雷达4点云的信息来绘制道路边界并保存本地地图在清洁区域中,将其与实时感知信息结合转换为本地地图,并实时生成可清扫的车辆区域. [0055]多层防撞子系统包括超声雷达7,单眼摄像机5和用于获取感知信息的车载控制器. 多级防撞子系统在安全范围内合并清扫车的障碍物信息当判断安全区域中的障碍物到清扫车的距离小于某个距离阈值时,出现紧急情况为了避免障碍物在清扫车的短距离内发生碰撞而停止.
[0056]远程监视系统实时监视并记录清扫车辆的车辆状态信息,包括工作速度,巡航范围,车辆位置,故障信息,清洁操作完成百分比等. 对于不同的清洁任务,清洁任务模式和多个清洁路径可以通过网络传输到清洁车. 同时,在特殊情况下,还可以发出清洁车的遥控命令. 系统包括计算机,4G模块和固态存储器. [0057]本发明的系统具有四种工作模式,即: 自动跟踪清洁模式,路边清洁模式,方形清洁模式和车道清洁模式. 根据清洁现场和用户需要执行不同模式的清洁操作. [0058](1)自动跟踪清洁模式[0059]在该模式下,根据用户需要设置参考清洁路径,智能电动清洁车可以沿参考路径进行清洁操作,同时感知通过智能传感和控制子系统实时监控环境中国其他交通参与者的姿势使用车载控制器来建立可扫区域,并实时规划扫掠轨迹以防止碰撞并实现自动跟踪扫掠操作. [0060](2)路边清洁模式[0061]在该模式下,对路边垃圾较多的场景进行路边清洁,根据用户需要设置路边清洁模式,智能电动清扫车通过智能感知和控制子系统实时感知右侧路边,计算扫地机与路边之间的距离,以实时校正扫地机的轨迹电动扫地车结构及原理,并防止与路边边缘附近的障碍物碰撞4 / 5页7CN 109828581 A7实现沿清洁模式行驶的道路.
[0062](3)正方形清洁模式[0063]在该模式下,对于正方形等较大的开放区域的清洁场景,根据用户需要设置正方形清洁模式,智能电动扫地车根据到清洁区域映射子系统的信息将建立方形清洁区域的地图,并在方形清洁区域地图中执行清洁轨迹的全局规划. 同时,车载控制器获取规划结果并实时确定清洁轨迹,以防止碰撞环境中的其他障碍物并实现方形清洁模式操作. [0064](4)车道清洁模式[0065]在该模式下,对于车道中存在垃圾的场景,智能电动清扫车根据用户设置的车道清洁工作模式,获取车道. 多级防撞控制子系统的感知信息线路位置和姿态信息,同时实时检测车道中的障碍物,协助车载控制器规划清洗轨迹,完成车道清洗不会发生碰撞,并实现车道清扫模式运行. [0066]以上仅是本发明的一个具体实施例,但是本发明的保护范围并不限于此,任何在本发明公开的技术范围内的技术领域的技术人员都可以容易地想到. 因此,本发明的保护范围应以权利要求的保护范围为准.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/dianqi/article-276123-2.html
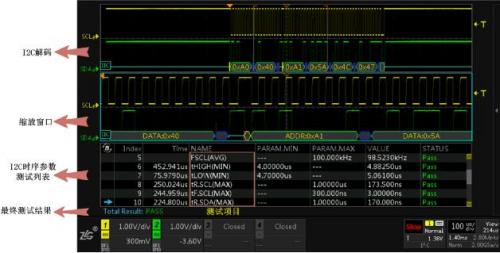 ADP5588的IDP时序分析
ADP5588的IDP时序分析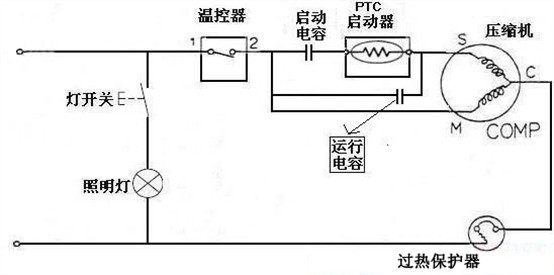 压缩机重锤电流启动器与PTC启动器之间的区别
压缩机重锤电流启动器与PTC启动器之间的区别 固态硬盘,SSD,分区,寿命,闪存
固态硬盘,SSD,分区,寿命,闪存 北京美的空调(维修点(24小时售后服务2019
北京美的空调(维修点(24小时售后服务2019
第二我们应该加快自己在南沙的岛礁建设