LDO稳压器的工作原理
电脑杂谈 发布时间:2020-06-01 22:23:36 来源:网络整理
在过去的十年中,随着设备(电池供电)的快速发展,诸如原始行业标准LM340和LM317之类的稳压设备已无法满足新的需求. 这些调节器使用NPN达林顿管,在本文中称为NPN调节器. 新型低压降(LDO)稳压器和准LDO稳压器(quasi-LDO)有望实现更高性能的电压调节器.
(原件: 线性稳压器: 工作原理和补偿原理)
NPN调节器(NPN调节器)
在NPN调节器中(图1: NPN调节器内部结构框图),使用PNP管驱动NPN达林顿传输晶体管,输入和输出V压差电压(压差)之间至少有1.5V至2.5V电压). 该压力差为:
Vdrop = 2Vbe + Vsat(NPN调节器)(1)

LDO调节器(LDO调节器)
在LDO(低压降)调节器中(图2: LDO调节器内部结构框图),传导管是PNP管. LDO的最大优点是PNP管只会带来很小的导通压降. 满载压降的典型值小于500mV,轻载时的压降仅为10-20mV. LDO的压差为:
Vdrop = Vsat(LDO稳压器)(2)

准LDO稳压器(准LDO稳压器)
Quasi-LDO(Quasi-LDO)调节器(图3: Quasi-LDO调节器内部结构框图)已在某些场合被广泛使用,例如: 5V至3.3V转换器. 准LDO在NPN稳压器和LDO稳压器之间命名. 传导管是单个PNP管,用于驱动单个NPN管. 因此,其下降电压在NPN稳压器和LDO之间:
Vdrop = Vbe + Vsat(3)

调节器操作
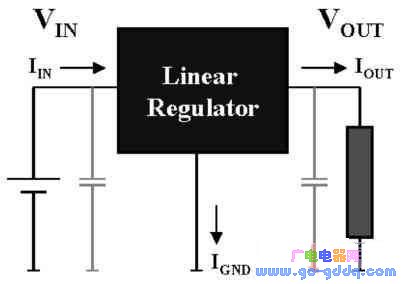
所有稳压器都使用相同的技术来稳定输出电压(图4: 稳压器的工作原理图). 输出电压通过连接到误差放大器反相输入的电阻分压器采样. 误差放大器的同相输入连接到参考电压Vref. 基准电压由IC内部的带隙基准产生. 误差放大器总是试图迫使其输入相等. 为此,它提供负载电流以确保输出电压稳定:
Vout = Vref(1 + R1 / R2)(4)

性能比较
NPN,LDO和准LDO之间在电气性能参数上的最大差异是: 压差电压和接地引脚电流. 电压降已在前面讨论过. 为了便于分析,我们将接地电流定义为Ignd(参见图4),而忽略了从IC到地面的小偏置电流. 然后,Ignd等于负载电流IL除以传导管的增益.
在NPN稳压器中,达林顿管具有高增益(高增益),因此仅需很小的电流即可驱动负载电流IL. 这样,其接地电流Ignd也将非常低,通常只有几个mA. 准LDO也具有更好的性能. 例如,National Half(NS)的LM1085可以输出3A,但只能输出10mA的接地电流.
但是,LDO的接地电流将相对较高. 满载时,PNP管的β值通常为15-20. 换句话说,LDO的接地电流通常达到负载电流的7%.
NPN调节器的最大好处是无条件的稳定性. 大多数设备不需要额外的外部电容器. LDO在输出端至少需要一个外部电容器以减小环路带宽并提供一些正相移(Positive Phase Shift)补偿. 准LDO通常还需要一个输出电容器,但其电容值小于LDO的电容,并且电容器的ESR限制也较小.
反馈和循环稳定性
所有调节器均使用反馈环路来保持输出电压稳定. 反馈信号在通过环路后将改变增益和相位. 环路的稳定性取决于单位增益(单位增益,0dB)频率下的相移总量.

波德图(Bode Plots)
可以使用波德图(Bode Plots)来确认回路的稳定性. 环路增益(单位: dB)是频率的函数(图5: 典型的波特图). 下一部分将介绍环路增益和相关内容. 可以使用网络(Network Analyzer)测量环路增益. 网络将低电平正弦波(正弦波)注入到反馈路径(反馈路径)中. 随着直流电压(DC)的持续升高,这些正弦波信号完成了频率扫描,直到增益降至0 dB. 然后测量增益响应.

波德图是一个非常方便的工具,它包含判断闭环系统稳定性的所有必要信息. 包括以下关键参数: 环路增益(环路增益),相位裕度(相位裕度)和零(零),磁极(极).
LOOP GAIN
闭环系统具有称为环路增益的特性. 在电压调节器电路中,环路增益定义为反馈信号(反馈信号)通过整个环路后的电压增益(电压增益). 为了更好地解释这个概念,对LDO的(图2)进行了如下修改(图6: 环路增益测量方法).

变压器(变压器)用于将交流信号(交流信号)注入到点“ A”和“ B”之间的反馈环路中. 使用该变压器,可使用小信号正弦波来“调制”反馈信号. 您可以测量点A和点B之间的交流电压(交流电压),然后计算环路增益. 环路增益定义为两点电压之比(比率):
环路增益= Va / Vb(5)
应注意,从Vb点传输的信号在通过环路时会发生相移(Phase Shift),最终到达Va点. 相移(Phase Shift)决定了环路的稳定性(Stability).
反馈(FEEDBACK)
如前所述,所有稳压器均使用反馈来稳定输出电压. 输出电压由一个电阻分压器采样(图6),分压后的信号反馈到误差放大器的一个输入端子. 误差放大器的另一个输入端子连接到参考电压. 电子管(通过晶体管)的输出电流可保持稳定的直流电压(DC电压)输出.
必须使用负反馈才能实现稳定的环路. 负反馈有时也称为退化反馈,与源信号的极性相反(图7: 反馈信号的相位图).

负反馈与电源的极性相反. 它将始终防止输出发生任何变化. 也就是说,如果输出电压想要升高(或降低),则负反馈环路将始终阻止并迫使其返回到正常值.
正反馈是指当反馈信号和源信号具有相同极性时发生的反馈. 此时,回路响应将与变化方向一致. 显然,不能实现输出的稳定性,不能消除输出电压的变化,但变化趋势会增大.
当然,没有人会性稳压器中使用正反馈. 但是,如果发生180°相移,则负反馈变为正反馈.
相移
相移是反馈信号经过整个环路后的相变总和(相对于起始点). 通常使用网络测量以度表示的相移. 理想的负反馈信号与源信号的相位差为180°(请参见图8: 相移),因此其起始点为-180°. 在图7中,您可以看到180°的偏移量,这是波形差的半个周期.

可以看出,从-180°开始,相移增加180°,信号相位恢复为零度,这将使反馈信号和源信号处于同一相位,从而使环路不稳定
阶段保证金
相位裕度(单位: 度),定义为频率的环路增益等. 0dB(单位增益,单位增益),即反馈信号的总相位偏移与-180°之间的差. 稳定的环路通常需要20°的相位裕度.
相移和相裕度可以通过伯德图中的零和极点来计算.
波兰人
极点定义为增益曲线的斜率是-20dB /十进制的点(图9: 伯德图中的极点). 每次增加一个极点,斜率就会增加20dB /倍频程. 增加n极n×(-20dB /十倍). 每个极点指示的相移与频率相关,并且相移从0到-90°(增加极点会增加相移). 最重要的一点是,几乎所有由极点(或零点)引起的相移都在十倍频程范围内.
注意: 一个极只能增加-90°的相移,因此至少需要两个极才能达到-180°(不稳定点).

零(ZEROS)
零点定义为增益曲线中斜率为+ 20dB /倍频程的点(如图10所示: 波特图中的零点). 零点产生的相移为0到+ 90°,曲线上有+ 45°角的过渡. 必须清楚,零点是“反极点”,其对增益和相位的影响与极点正好相反. 这就是为什么将零点添加到LDO稳压器的环路. 零点可以抵消极点.

波德图分析
使用具有三个极点和一个零点的波特图分析增益和相位裕度(图11: 波特图).

假定直流增益为80dB,则第一极点的频率为100Hz. 在此频率下,增益曲线的斜率变为-20dB /十倍. 1kHz处的零点使斜率为0dB /十倍,而10kHz处的斜率变为-20dB /十倍. 第三个也是最后一个100kHz的极点将最终将斜率更改为-40dB /十倍.
您可以在图11中看到,单位增益交叉(0dB)的交叉频率为1MHz. 0dB频率有时称为环路带宽.
相移图显示了零和极点的不同分布对反馈信号的影响. 为了生成该图ldo稳压器工作原理,有必要基于分布的零点和极点计算相移之和. 极点在任何频率(f)处的相移均可通过以下公式计算:
极相移= -arctan(f / fp)(6)
任何频率(f)的零相移都可以通过以下公式计算:
零相移= -arctan(f / fz)(7)
该电路稳定吗?要回答这个问题,我们根本不需要复杂的计算,只需要知道0dB(在这种情况下为1MHz)下的相移即可.
前两个极点和第一个零分布将相位从-180°更改为+ 90°,最终导致网络相位更改为-90°. 最后一个极点在十个八度频段中具有0dB点. 用零点相移公式,可以计算出极点具有-84°(在1MHz)的相移. 加上原始的-90°相移,总相移为-174°(即相差为6°). 由此得出结论,环路不能保持稳定,可能会引起振荡.
NPN监管机构补偿
NPN调节器的传导管的连接模式(见图1)是共集电极模式. 所有公共集电极电路的一个重要特征是输出阻抗低,这意味着电源范围内的极点出现在环路增益曲线的高频部分.
由于NPN稳压器没有固有的低频极点,因此它使用了一种称为主导极点补偿的技术. 该方法是在稳压器内部集成一个电容器,该电容器在环路增益的低频端增加一个极点(图12: NPN稳压器的波特图).

NPN调节器的主导极点,以P1点表示,通常设置为100Hz. 100Hz的极点将增益降低到-20dB /倍频程,直到3MHz处的第二极点(P2). 在P2处,增益曲线的斜率增加-20dB /倍频程. P2点的频率主要取决于NPN功率管和相关的驱动电路,因此该点有时称为电源极(Ppower极). 另外,点P2出现在-10dB的环路增益处,这意味着单位增益(0dB)频率(1MHz)时的相移会很小.
为了确定稳定性,仅需要计算0dB频率处的相位裕量.
第一个极点(P1)会产生-90°的相移,但是第二个极点(P2)仅会增加-18°的相移(在1MHz时). 换句话说,在0dB点的相位偏移为-108°,相位裕度为72°,表明环路非常稳定.
需要两个极点来使环路达到-180°(不稳定点)的相移,并且极点P2处于高频,并且其0dB处的相移非常小.

LDO稳压器的补偿
LDO调节器中PNP传导管的连接方法是常见的发射器方法. 与普通的集电极方式相比,它具有更高的输出阻抗. 由于负载阻抗和输出电容电抗的影响,低频极点(低频极点)将出现在低频处. 该极点也称为负载极点,用P1表示. 负载极的频率通过以下公式计算:
F(Pl)= 1 /(2π×Rload×Cout)(8)
从该公式可以看出,LDO不能通过简单地增加主极来补偿. 为什么?首先,假设5V / 50mA LDO稳压器具有以下条件. 在最大负载电流下,负载极点(Pl)出现的频率为:
Pl = 1 /(2π×Rload×Cout)= 1 /(2π×100×10-5)= 160Hz(9)
假设内部补偿会在1kHz处增加一个极点. 由于存在PNP功率管和驱动电路,功率极(Ppwr)将出现在500kHz处.
假设直流增益为80dB. 最大输出电流时的负载电阻为RL =100Ω,输出电容为Cout = 10uF.
以上条件可用于绘制相应的波特图(图13: 无补偿LDO增益波特图).

可以看出循环是不稳定的. 极PL和P1各自产生-90°的相移. 在0dB(在此示例中为40kHz)下,相移达到-180°. 为了减少负相移(防止振荡),必须在环路中添加一个零. 零点会产生+ 90°的相移,从而抵消了两个低频极点的部分影响.
因此,几乎所有的LDO都需要在循环中添加这个零点. 通常通过输出电容器的等效串联电阻(ESR)获得该零点.
使用ESR补偿LDO
等效串联电阻(ESR)是电容的基本特征. 电容可以表示为电阻和电容的串联等效电路(图14: 电容器的等效电路图).

输出电容器的ESR在环路增益中产生零,可用于减少负相移. 零点处的频率值(Fzero)与ESR和输出电容值密切相关:
Fzero = 1 /(2π×Cout×ESR)(10)
再次看上一节中的示例(图13),假设输出电容值Cout = 10uF,输出电容ESR =1Ω. 然后零点出现在16kHz. 图15中的Bode图显示了添加零点如何恢复不稳定系统的稳定性.

增加了环路的带宽,单位增益(0dB)的交叉频率从30kHz移至100kHz. 在100kHz时,零点总计增加+81°的相移(正相移). 即,减小了由磁极PL和P1引起的负相移(Negative相移). 极点Ppwr在500kHz时,在100kHz时仅增加-11°的相移. 将所有零和极加在一起,则0dB处的总相移为-110°. 也就是说,相位裕度为+ 70°,系统非常稳定.
这说明选择具有适当ESR值的输出电容器会产生零点以稳定LDO系统.
ESR和稳定性
通常,所有LDO都要求其输出电容器的ESR值在一定范围内,以确保输出的稳定性. LDO制造商将提供由输出电容器ESR和负载电流(Load Current)定义的一系列曲线,以定义稳定范围(图16: 典型LDO ESR稳定范围曲线),作为选择电容器时的参考.

为解释为什么存在这些范围,我们使用上述示例来说明ESR电平对相位裕度的影响.
高ESR

类似地,使用上一节中提到的示例,我们假定10uF输出电容器的ESR增加到20Ω. 这样会将零点的频率降低至800 Hz(图17: 高ESR引起的环路振荡的波特图).

降低零点的频率将增加环路的带宽,其单位增益(0Db)的交叉频率将从100kHz增加到2MHz. 带宽的增加意味着极点Ppwr将出现在带宽之内(比较图15). 在图17的Bode图中分析曲线的相位裕度,发现如果同时删除P1或PL中的零点和一个极点,则曲线的形状几乎没有影响. 换句话说,环路受-90°相移低频极和-76°相移高频极Ppwr的影响.
尽管相位裕度为14°,系统仍可能稳定. 但是,许多经验测试数据表明,当ESR>10Ω时,可能会由于其他高频极的分布而引入不稳定性(此简单模型未显示).
低ESR
选择具有非常低ESR的输出电容器,由于一些不同的原因,该电容器也会发生振荡. 继续上一节中的示例,假设10uF输出电容器的ESR只有50mΩ,则零点的频率将变为320kHz(图18: 低ESR引起的环路振荡的波特图).

请注意,未经计算,系统不稳定. 两个极点P1和PL在0dB处产生-180°的相移. 如果系统要稳定,则应在零点之前补偿零点的正相移. 但是,零点是320kHz,已经超出系统带宽,因此无法补偿.
选择输出电容器
总而言之,输出电容器用于补偿LDO稳压器,因此选择时必须小心. 基本上,由LDO应用引起的所有振荡都是由于输出电容器的ESR太高或太低.
LDO的输出电容器(通常是钽电容器)是最佳选择(某些为使用陶瓷电容器而专门设计的LDO除的中心(图16).
另一点非常重要. 在-40°C至+ 125°C的温度范围内,AVX电容器的ESR变化小于2: 1. 铝电解电容器在低温下具有更大的ESR,因此不适用于LDO输出电容器.
必须注意,大型陶瓷电容器(≥1uF)通常使用非常低的ESR(<20mΩ),这将导致几乎所有LDO稳压器振荡(LP2985除内温度的上升和下降将导致电容值变化两倍,因此不推荐使用. <
准LDO补偿
准LDO的稳定性和补偿(图3)应考虑LDO和NPN稳压器的特性. 由于准LDO稳压器使用NPN传导管,因此其常见的集电极组合也使其输出(发射极)的阻抗显得较低.
但是,由于NPN的基极是由高阻抗PNP电流源驱动的,因此准LDO的输出阻抗不会像使用NPN达林顿晶体管的NPN稳压器的输出阻抗那样低. LDO的输出阻抗应低.
也就是说,准LDO的电源极点的频率低于NPN稳压器的频率,因此,准LDO也需要一些补偿才能达到稳定性. 当然,该电源极的频率比LDO的频率高得多,因此准LDO只需要一个很小的电容,对ESR的要求不是很高.
例如,准LDO LM1085可以输出高达3A的负载电流,但只需要一个10uF的输出钽电容器即可保持稳定性. 准LDO制造商不一定提供ESR范围的图形,因此准LDO对电容器的ESR的要求非常宽松.
低ESR LDO
National Half(NS)的两个LCO LP2985和LP2989要求输出电容器安装有超低ESR,例如陶瓷电容器. 该电容器的ESR可低至5〜10mΩ. 但是,如此小的ESR可能会导致典型的LDO稳压器振荡(图18).
为什么LP2985在如此低的ESR电容下才能稳定工作?美国国家半导体在IC内部放置了一个钽输出电容器,以补偿零点. 这样做是为了降低稳定ESR的上限. LP2985的ESR稳定范围为3Ω至500MΩ,因此可以使用陶瓷电容器. 典型的不加零点的LDO的稳定ESR范围通常为100mΩ-5Ω,这仅适用于钽电容器,不适用于陶瓷电容器.
要了解ESR范围下限的原因,请参考图15. 如上所述,此LDO的零点已集成在IC中. 因此,由外部电容器产生的零点必须处于足够高的频率,以使得带宽不能变宽. 否则,高频极将产生较大的相移并引起振荡.
使用场效应晶体管(FET)作为直通LDO的优势
LDO稳压器可以使用P-FET(P沟道场效应晶体管)作为传导管(图19: P沟道场效应晶体管LDO的内部结构框图). 为了说明使用P1-FET LDO的好处,需要基本电流来驱动PNP LDO中的PNP功率晶体管(图2). 基极电流从接地引脚流出,并反馈到反相输入电压端子. 因此ldo稳压器工作原理,这些基本驱动电流不用于驱动负载. LDO稳压器中的功耗通过以下公式计算:
PWR(基本驱动器)= Vin×Ibase(11)

驱动PNP管所需的基本电流等于负载电流除以β值(PNP管的增益). 在某些PNP LDO稳压器中,β值通常为15至20(与负载电流有关). 该基本驱动电流产生的功耗不是我们预期的(特别是在电池供电的低功率应用中). P沟道场效应晶体管(P-FET)的栅极驱动电流非常小,很好地解决了这个问题.
P-FET LDO稳压器的另一个优点是,可以通过调节场效应晶体管(FET)的导通电阻来降低稳压器的压降. 对于集成稳压器,每单位面积制造的场效应功率晶体管(FET功率晶体管)的导通电阻将低于双极ONP器件的导通电阻. 这样可以在较小的封装中输出更多电流.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/dianqi/article-230471-1.html
-

-
谭文龙
真心提醒各位国内的食用油价格低于5元
 五洲的海尔空调哪个好
五洲的海尔空调哪个好 西门子家用电器官方旗舰店正式落户天猫
西门子家用电器官方旗舰店正式落户天猫 板式热交换器如何使用?
板式热交换器如何使用? 曲靖中杆灯-高杆灯-户外道路照明灯具高度定制-路灯厂家直销价
曲靖中杆灯-高杆灯-户外道路照明灯具高度定制-路灯厂家直销价
是因为你的家在