四个字符概括了扫地机器人的工作原理和优化方向
电脑杂谈 发布时间:2020-04-09 13:27:59 来源:网络整理
扫地机器人的工作原理和优化方向的四个词总结是“逐步的”,逐渐从电路和结构的复杂协调转变为模块化的合作分工. 确保机器的不同功能部件是独立的并且相互配合. 一个已损坏,另一个仍不能延迟. 就像现在流行的组合首次亮相一样,如果一个人忘记了舞步,另一个人就必须抓紧时间. 清扫机器人,一种现代工具,在这一点上尤其明显.

机器人吸尘器底盘

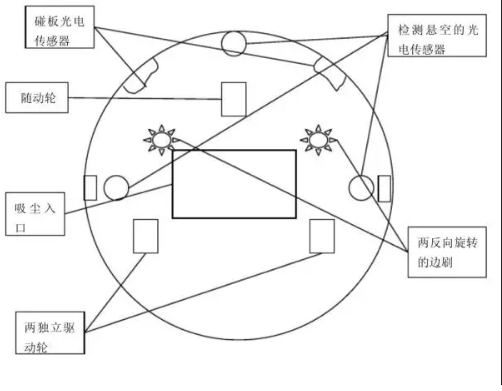
从整体结构上看,市场上几乎所有扫地机器人都是由一个万向轮和两个驱动轮组成的“三轮车”. 主要结构是一个或两个侧刷,将垃圾带到真空辊刷的嘴中并让其进食. 不同之处在于,智能机器人可以通过底部的悬浮传感器和碰撞传感器反馈实际的地面状况. ,然后做出判断.
可以说扫地机器人滚刷,机械结构决定了清洁机器人的清洁能力,算法的更新决定了清洁效率.

我们反汇编说
小扫帚+马达扫地机器人滚刷,依靠它解放双手
清扫机器人可以完成有效的清洁工作,最重要的是真空辊刷.

滚刷的工作状态
到目前为止,市场上的真空辊刷主要经历了三代更新. 从一开始,仅基于真空吸尘器的真空吸尘结构得到了改善,后来增加了单辊刷以增强清洁能力. 主流的双滚筒刷结构为胶体滚筒刷加羊毛滚筒刷,相对吸尘口旋转,并与侧刷配合,最终达到系统清洁的目的.


具有双滚筒刷结构的齿轮箱
如上所示,带有金属轴承的齿轮接受橡胶辊刷和羊毛辊刷. 两个滚筒刷均使用同一电机,并配备了齿轮箱,齿轮箱不仅可以更换两个滚筒刷. 旋转速度还可以沿相反方向吸收垃圾. (您认为这部分像许多电影的开场一样拍摄吗?)
倒车时要小心. 倒车,请注意
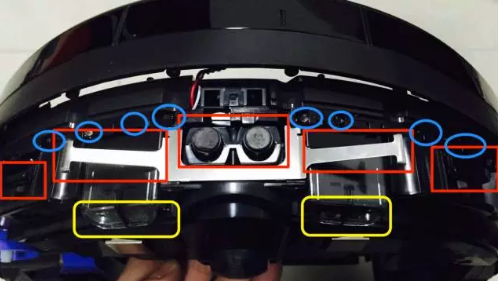
在卸下机器人吸尘器前面的防撞板之后,我们可以从视觉上看到内部的防撞设计.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/dianqi/article-169461-1.html
相关阅读
发表评论 请自觉遵守互联网相关的政策法规,严禁发布、暴力、反动的言论
-
 扎西拉姆
扎西拉姆
 雄安至福州物流1381045455913810452529
雄安至福州物流1381045455913810452529 落地电风扇
落地电风扇 如何选择橱柜台面有用?有人听到的时候,我差点选错了!
如何选择橱柜台面有用?有人听到的时候,我差点选错了! “面对面”招聘真的很不错求职者想在家工作
“面对面”招聘真的很不错求职者想在家工作