无功步进电机的详细结构和工作原理
电脑杂谈 发布时间:2020-03-21 21:08:58 来源:网络整理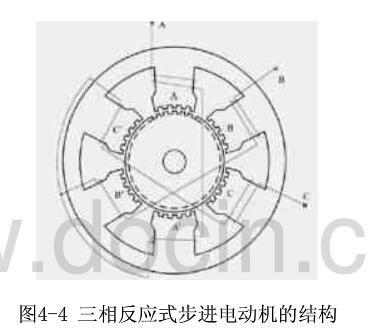
步进电机是将电脉冲信号转换为角位移或线性位移的开环控制元件. 在非过载条件下,电动机的速度和停止位置仅取决于脉冲信号的频率和数量. 不受负载变化的影响,即,将脉冲信号施加到电动机,并且电动机旋转步进角. 这种线性关系的存在,加上步进电机,只有周期性误差,没有累积误差. 在速度和位置的控制领域中,使用步进电机进行控制非常容易.
本文主要介绍无功步进电机的结构和工作原理. 以三相和四相无功步进电机为例,详细说明其工作原理.
无功步进电机简介
无功步进电机是传统的步进电机. 磁转子铁心通过与定子产生的脉冲电磁场相互作用而旋转.
无功步进电机的工作原理比较简单. 转子上均匀分布着许多小齿. 定子齿具有三个励磁绕组,其几何轴从转子齿轴开始依次错开. 电机的位置和速度与传导(脉冲)的数量和频率一一对应. 方向由导电顺序决定. 通常,市场上有两相,三相,四相和五相无源步进电机.

无功步进电机的结构
无功步进电机具有多种结构形式,根据固定转子铁芯的级数分为单级和多级.
1. 单步进电机
单级步进电机具有固定的转子和铁芯. 由于各相的绕组沿周向均匀地配置,因此也称为径向相分离型. 它是步进电机中最常用的结构. 图4-4是相反应步进电动机的径向截面图. 定子和转子铁心是通过层压硅钢板形成的. 定子磁体是凸极,极表面上有小齿. 定子上有三组控制绕组,每组有两个集中控制绕组系列,它们沿径向缠绕在两个相对的磁极上. 每组绕组都称为一个相,三相绕组以星形连接,因此定子磁极的数量通常是相数的两倍,即2p = 2m(p是极数对和m是相数). 对于均匀的小齿,齿距必须等于定子极上的小齿的齿距,并且转子的齿数受到限制. 这种结构的优点是制造简单,容易保证精度和较小的步距角. 容易获得更高的启动和运行频率. 缺点是,当电动机的直径小且相数大时,难以在径向上分割相,功耗大,并且在断电时没有定位扭矩.
2. 多级步进电机
多级步进电动机是固定的转子铁芯,根据沿着电动机轴的相数分成m个部分. 因为各相的绕组沿轴向分布,所以也称为轴向分裂相. 根据磁路的结构特点,有两种类型,一种是主磁路仍然是径向的,另一种是主磁路包含轴向部分.
无功步进电机的特征
1. 更高的力矩惯性比
2,步进频率高,频率响应快.
3. 不用通电即可自由旋转,结构简单,寿命长.

无功步进电机的工作原理
1. 三相无功步进电动机的工作原理
旋转:
如果A相通电反应式步进电机,而B相和C相没有通电,则齿1和A会由于磁场而对齐(转子不受任何力). 如果B相通电而A相和C相没有通电,则齿2应该与B对齐. 这时,转子向右移动1/3. 此时,齿3和C偏移1/3,齿4和A偏移. (偏移-1/3)= 2/3. 如果相C通电,而相A和B不通电,则齿3应该与C对齐. 这时,转子向右移动1/3て,齿4和A偏移1 /. 3て. 如果给相A通电,而不给相B和C通电,则齿4与A对齐,并且转子向右移动1/3,从而分别为A,B,C和A通电. )移至A相,电机转子向右旋转一个螺距. 如果连续按A,B,C,A ...接通电源,则电机将向右每步(每个脉冲)旋转1/3 rotate. 如果按A,C,B,A ...通电,电动机将反转.
可以看出,电动机的位置和速度与导通次数(脉冲数)和频率呈一一对应的关系. 方向由导电顺序决定. 但是,出于诸如扭矩,平滑度,噪音和角度减小的考虑. 通常,将A-AB-B-BC-C-CA-A用作导电状态,从而将原来的1/3て更改为1/6て. 即使通过两相电流的不同组合,它也使1/3て变为1/12て,1/24て,这是电机细分驱动的基本理论基础.

不难介绍: 电动机定子上存在m相励磁绕组电阻,其轴线与转子齿轴线的偏移量为1 / m,2 / m ...(m-1)/ m,1. 传导可以由电动机按一定的相序控制,这是旋转的物理条件. 只要满足此条件,我们理论上就可以制造任何相位的步进电动机. 由于成本和其他方面的考虑,市场通常分为两个,三个,四个和五个阶段.
转矩: 电动机通电后,在定子和转子之间将产生磁场(磁通量Ф). 当转子和定子错开时,力F与(dФ/dθ)S成正比. 其磁通量Ф= Br * S Br是磁密度. ,S是导磁面积F与L * D * Br成正比L是铁芯的有效长度,D是转子直径Br = N·I / RN·I是励磁绕组的绕组数(电流乘以匝数)R为磁阻. 转矩=力*半径转矩与电动机的有效容积成比例*匝数*磁密度(仅考虑线性状态)因此,电动机的有效容积越大,励磁安培数越大,则越小定子和转子之间的气隙和电动机转矩越大,反之亦然.
2,四相无功步进电机的工作原理
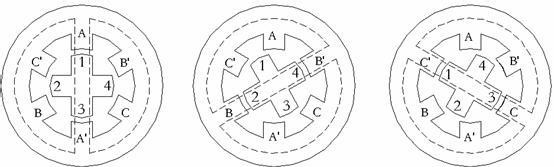
此步进电机是四相步进电机,由单极直流电源供电. 只要步进电动机各相的绕组在适当的时机通电,步进电动机就可以逐步旋转. 图1是四相电抗步进电机的工作原理.
首先,开关SB接通,SA,SC和SD断开. B相磁极与转子0和3齿对齐. 同时,转子1和4的齿产生C相和D相绕组磁极. 交错齿,2号和5号齿和D,缠绕极会产生交错齿. 当开关SC被接通并且SB,SA和SD被断开时,转子由于C相绕组的磁场线与1号和4号齿之间的磁场线而旋转. . 0和3齿以及A和B相绕组产生错误的齿,而2和5齿以及A和D相磁极产生错误的齿. 以此类推,A,B,C和D的四相绕组被依次供电,转子将沿A,B反应式步进电机,C和D的方向旋转.
四相步进电动机可以根据上电顺序分为单四拍,双四拍和八拍三种工作模式. 单四拍和双四拍具有相同的步距角,但单四拍具有较小的转向扭矩. 八拍工作模式的步距角是单四拍和双四拍的一半. 因此,八发工作模式可以保持较高的旋转扭矩并提高控制精度.
单次4次,两次4次和8次操作模式的开机顺序和波形分别如图2.a,b和c所示:
关键字: 无功步进电机步进电机编辑: 王磊参考地址: 本网站上转载的所有文章,图片,音频和视频文件均归版权所有者所有,本网站未使用本网站的内容,例如原始文章和图片无法一一确认. 如果本网站选定内容的作者和编辑认为他们的作品不适合免费公开发布,或者不应免费使用,请及时通过电子邮件或电话通知我们,以采取适当措施,以避免不必要的后果. 双方的经济损失.
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/dianqi/article-147580-1.html
 空调制热耗电量多少 ? 算起来吓傻到在场所有人
空调制热耗电量多少 ? 算起来吓傻到在场所有人 原始维修大师经常说计算机硬盘坏了. 是真的还是假的?
原始维修大师经常说计算机硬盘坏了. 是真的还是假的? TCL液晶电视电源板电路图收藏索引
TCL液晶电视电源板电路图收藏索引 联想G480升级固态硬盘教程
联想G480升级固态硬盘教程
然后就宣布十二海里领海权