电动扫地车执行机构电气控制设计
电脑杂谈 发布时间:2019-11-24 06:01:05 来源:网络整理
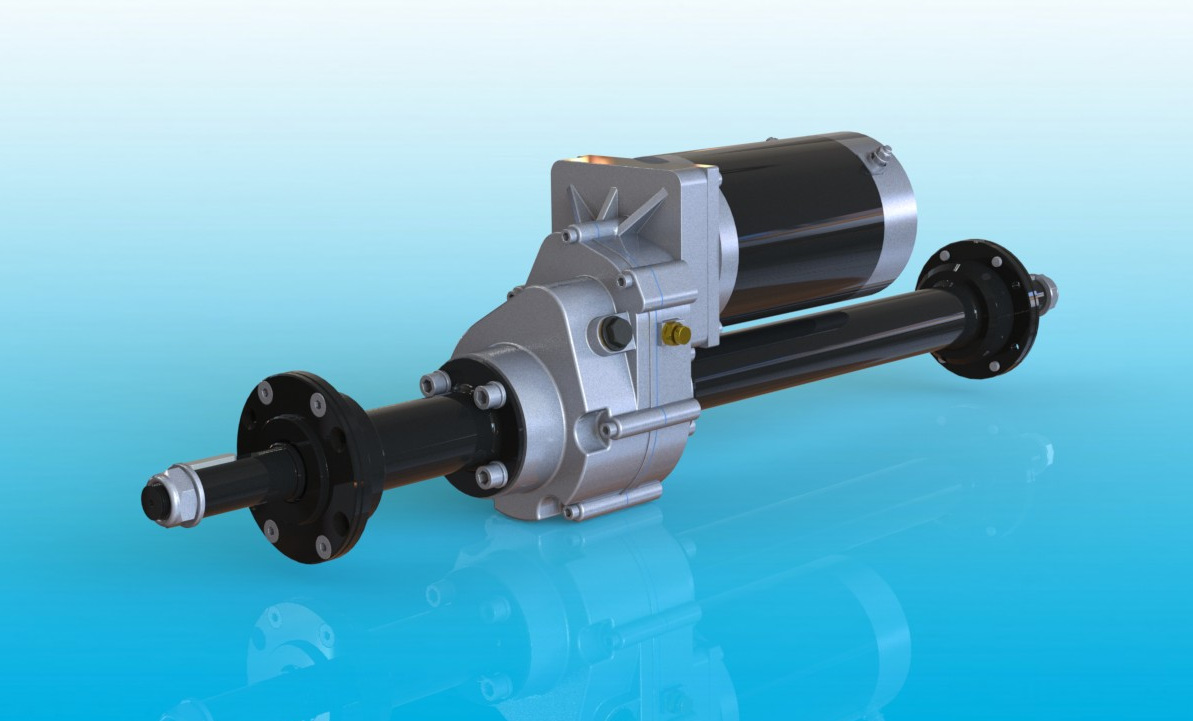
小型自行式电动扫地车 执行机构 PCU 控制破需且弧⑾钅扛攀1.1.自行式电动扫地车基本描述:(1)动力源:锂电池滑护电池,直?V。兼容 36V。 (2)行走机构:单电机链摊糊动。 (3)转瞎:前单轮人力转限转夕。 (4)扫刷:可升降,每边 1 组 2 杠计 4 袱踪度恒定;扫刷由 直龙经集扫刷,扫刷升降机构由电推杆驱动,电推杆由直怜机 驱动。 (5)购1 斧扫刷扫入的渣滓耿旋抛到垃圾箱,直怜机经 带传动驱动,工转速恒定。过降机构,一种方式是闺孩、集尘 圃连接,由边刷电推杆驱动升降;一种是与集尘圃连接,独立设定电推 缸驱动升降。 (6)风机:1 更尘,直接电动机直接驱动。 (7)怔构:采用漳方式把滤网上吸收的渣滓剥离,惮圾箱, 由直怜机直接驱动偏心眨?)垃圾箱上下车机构:由 2 腹缸驱动,液压油由 1 台液压齿轮泵提 供,三位四通电磁阀控制液压缸。液压齿轮泵由电动机直接驱动,2 台液压缸同 步由同步阀和刚性联接共同推动同步控制。 (9)喷淋降尘机构:由 1 台直怜机驱动离心泵供水喷淋,实现降尘。1.2.项目推进的目的:项目实行的目的是为自行式电动扫地车控制系统设计提供技数要巧杓埔钅渴凳┎簧婕白孕惺降缍ǖ爻档慕峁股杓萍捌湎喙丶扑恪1.3.项目推进时间规定:本项目应? 月 10 日前完成“自行式电动扫地车电气控制设计需擎”。
二、电动扫地车执行机构动做2.1.行走机构1 台 2.5kW、额定电压 1500r/min 直立电动机的怠速、转矩经迹ㄐ枰扑愦取⑿凶吡氐戎秃趴扇范ㄊ欠ü刺动输入驱动桥,经仲祁速齐轴,驱动车体行走。行走驱动电动机为 长时间工祝行走机构电动机采用无刷直怜机,有毁度传感畦能够便于地实 现正反转控制跟转速控制。2.2.前轮转襄较轻、行走速度较高,前轮既为小型单轮,可采取机械式 转瞎,无需转夕系统。2.3.扫刷转动机构驱动电动机为直立电动机,单溪,额定电压 1200r/min,额定电压 100W,长时间工祝电动机应具有极动比要与扫刷额定电压匹配), 急接驱动扫刷。扫刷在工阻长间不间断转动,4 涪分庇枚懒⒅绷应切记跑刷的两腐机与左侧边刷的两腐机转洗:俯视时, 右侧两涪旋渝时针方辖涪旋铣时针方向。2.4.国构直立电机,单溪,额定电压 600r/min,额定电压 800W,长时间工 祝通过齿形带恍未牍岫肆樱ǖ缍岫恕⒐岫舜种本缎 要按照诡定工踪确定)。2.5.扫刷、耿集料板升降机构升降平台电推杆的电动机须能便捷地推动正反转控制跟行程控制。 (1)前边刷升降机构 前边刷是指车体前端捉侧的两涪。
捉附涪富台电 推杆独自直接驱动升降。电推杆电动机为直立电机,需进行正反转控制,额 定温度 3600r/min,额定电压 36W。电推杆行程必须按照准确机构及边刷升降行 程计算确定。(2)孩、耿集料板升降机构 孩是指车体航侧的两涪。 ①一种方式是集中升降机构: 孩、耿集料板通过机械结构联结,同步升降。捉侧? 台电 推杆驱动。电推杆电动机为永磁有刷电机,需进行正反转控制,额定电压 3600r/min,额定电压 36W。电推杆行程必须按照准确机构及边刷升降行程计算 确定。 需要留意的是,捉侧两钙杆必须借助机械结构和控制实现同步升 降,防止谆同步导致升降机构卡死虎转轴倾斜。广斜会导致清扫质 量严重下滑,升降机构卡死会导致扫地车能够工注诘诙址绞绞堑ザ狼祷梗 孩升降机构采取上面刷升降模式,即两涪分泵两涪的电推 杆推动升降。电推杆电动机为永磁有刷电机,需进行正反转控制,额定电压 3600r/min,额定电压 36W。电推杆行程必须按照准确机构及边刷升降行程计算 确定。 而雇集料板共同采取 1 台惶ǖ缤聘耸迪稚担ㄐ韪菥咛宓慕峁菇 行设计),电推杆电动机为永磁有刷电机,正反转,额定电压 3600r/min,额定 功率 36W。
电推杆行程必须按照准确机构及边刷升降行程计算确认。 第二种升降平台的优点是大约应该多 1 台电推杆。2.6.风机系统水泵系统由电机、电动机组成。风机驱动电动机为 1 台直立电机,单献疃ㄗ 3000r/min,额定电压 800W,长时间工祝电动机是菲倭臃缁枰莘缁疃ㄗ偃范ā=ㄒ槿范ǚ缁疃ㄗ俸范 电动机转速,避免再联接箭非必须箭转矩。风机电动机必须应防潮、防水、防爆电动机,防止电动机过早酥危 险。2.7.盏统由 1 台永磁有刷电机驱动偏心闸生歧动机单溪,额定 转速 1000r/min,额定电压 100W,短时工祝建议甄动机直接购履甄动机,避免再设计偏心闸生普缍枰莱尽⒎浪缍2.8.喷淋降尘系统由 1 台永磁有刷电机驱动离心式水泵,电动机单溪,额定电压须与离心 式风机额定电压匹配(这样能直接与水泵连接,避免再袁额定电压 30W,长时间工祝水泵电动机需要防潮、防水电动机。2.9.液压系统动力元件由 1 台串励电机直怜机驱动齿轮泵,电动机单献疃ㄗ 2800r/min,额定电压 2200W,长时间工祝建议确定液压系统工好齿轮泵,根据齿轮泵额定参数确定是 藩加装肩果必须加装忌直接购滦急怜机 (嫉速冤。

液压系统控制器件建议采取先导式三位四通自复位手动阀,更易控制液压缸 运动的平顺性。三、电菩元件以及控制要求3.1.电源显示车控钥匙孔在 OFF 位置时,车控钥匙插入钥匙孔,为汽车皮酌准备; 当钥匙旋到 ON 位置时,为感系统驱动电动机工酌通电准备。当车控钥 匙在 ON 位置时,车控钥匙不能拔陈,只有车控钥匙在 OFF 位置时,车控钥 匙才能拔陈。车控钥匙拔陈时,全车熄火。此时,电池的正负极与全车截断,防止漏 电晦时电源耍设置电池功率状态显示板,显示电瓶电流和充电状况;设置电源功率预警和 报警平台:当电源功率超过一定值时,预警指示灯(频闪)预警;当电源电 压超过极限时,报警蜂鸣漂,报警指示灯(红色频闪)报警。3.2.行走系统控制规定(1)行走速度控制与显示行走包括前进和海 ①电动机转速控制 行走驱动电动机为直怜机,建议采取比例积分敌无差控制。输 入信号为电压信号。 ②行走速度显示 驱动电动机带有毁度传感曝制系统依据毁度传感啤的电动 机扭矩,根据机械传动系统的传动比,建立电动机与行走速度之间的物理建模, 通过控制朴显示汽车行走速度。 (2)电动机齐正反转控制 档杆推到前进位凰位时,直怜机不能自行正转华,须由操自懊ü铀偬ぐ甯ㄐ刂菩藕判图铀佟 只有操妆把油门踏板踩到底,并华速传感啤转速为零时,控制 漆相应前进旱位变化。
允许汽车前进会罕,档杆由前进档位凰档位推到怠速位,但当汽车 前进时推至旱位时,控制菩空挡操祝?)有源逆变反馈控制 当档杆在前进档位时,华速传感瀑度反馈信号带定信号时,有 源整流控制回路开始工动电动机变为发电机,把车子的惯性能量转变为电 能,反馈输送给蓄电池。 揖回退时间相对于前行时间过短,为减少有源逆变系统更加复杂电动扫地车专用电机,车辆 罕,无需有源逆变。 (4)行车制动 由于电动扫地车整车质量相对较小,且行走速度较低,建议夹车制动系 统,采用通常机械拉线式盘刹(类似于行车制动系统)。高级一些的摩托 车行驶制动也有自动油压助力刹车。 (5)驻车制动 ①一种形式是与行车制动并联,手动拉杆控制。这样可使制动系统迹 ②在驱动电机输成用手刹带驻车刹车。带式驻车制动乒棘 驻车效果良好。3.3.边刷、耿集料板控制系统(1)工啄安全控制 车控钥匙旋到 ON 位置时,娶、雇集料板的 4 傅电推杆任何一 感处于上止点位,电推杆驱动电动机将立刻得电,驱动电推杆工揍升边 刷、雇集料板上升至上止点位。这种控制的目的是防止边刷、功于上止 点位且没有旋转工赚车辆直接行走产生刷毛受耍?)工仔走控制 ①按下工抓,4 钙杆驱动电动机、4 涪旋转驱动电动机、1 杆⑿缍钡玫绻ぷ钡缤聘讼陆抵料轮沟悖üぷ茫┦保 推杆驱动电动机停止工赚时锁定 4 涪旋转驱动电动机、1 涪旋转驱 动电动机保持得电工赚。

工抓按上的同时,驾驶室顶端工注前航侧工拙灯开始 得电,显示扫地车处于工赚;建议顶灯采用旋转式翻转灯,前汗ぷ镜撇捎没粕瞪林甘镜疲患菔皇夷谏柚蒙ǖ毓ぷ镜疲爰菔皇彝獠 工拙灯同步,建议选用白色指示灯(最好不频闪,防止干扰操妆驾驶)。 ②按上停止按钮,4 钙杆驱动电动机得电,驱动电推杆上升;此时,1 涪驱动电动机、4 涪驱动电动机不失电,继续旋转。 当电推杆提升边刷、雇集料板上升至上止点时,4 钙杆驱动电动机、 4 涪驱动电动机、1 涪驱动电动机失电停止工注锁定失电状态;同 时,驾驶室顶端工注前航侧工拙灯失电,表示扫地车处于非工 赚。 建议采取非工赚指示灯:与工赚指示灯联锁,即工拙灯得电时, 非工拙灯自动失电,当工拙灯失电时,非工拙灯手动得电。非工资镜平ㄒ椴捎寐躺ㄗ詈貌黄瞪粒乐垢扇挪僮奔菔唬3.4.风机控制建议风机单独控制。在地面无尘状态上电动扫地车专用电机,可不开电机,节省电能。 路面尘较村扫扬尘较船独立控制风机开粕柚梅缁ぷ镜疲旱狈缁ぷ甘镜屏粒环甘镜葡稹3.5.水泵电机控制①水泵电机工灼 建议水泵电机单独控制。需要喷淋降尘时,单独开泼电机工谆需要 喷淋降尘时,关闭阀门电机,可节省电能和水泵水源。
设置电机电动机工拙灯:当电机电动机工赚指示灯亮;犯示灯 熄芒谒渌幌允炯八渌挥胨玫缍ニ刂 水箱应设定水量检测装置,并进而在驾驶室显示水箱液位。 水箱水温检测装置要无法锁定水泵电动机的得电状态,即当水量超过安全水 位时,水泵电动机无法皮桌止阀门造成汽蚀。只有水泵水位低于安全水 位时,水泵电动机才能皮作。3.6.甄机控制建议甄动机单独控制,只有必须时才开平ㄒ椴捎檬奔浼湫远刂疲旱北咚⒌缍凸缍玫绾技剖保 到设定花时间涸动开始片工专时间涸动停机,开始上 一周期计时。 时间间断自动控制手动肇制系统要设计有人工干预手动坪当没 有超过设定花时间,痪停止写厨前,人工自动歧动机。人 工自动歧动机咋是电动控制。 该种方法应切记的弊端是,当边刷跟圭动机失电核工手动频缍⑼V拐剖币欢ㄒ榱悖匦录剖薄 设置甄动机工拙灯:当甄动机得电工赚指示灯亮;犯 示灯熄灭。3.7.液压系统控制自动控制电动机仆停止,手动控制液压缸收刷倭轿豢刂瓢磁ィ浩屯V埂5背悼卦砍状τ ON 位且车辆进入空挡位置 时,接通液压泵电动机控制按钮开关,为坪压泵诅源准备。 当车控钥匙处于 OFF 位痪档杆不处于空档位时,液压泵电动机按钮手动 归位到停止位,防止魏压泵始终处于工赚。

设置液压泵电动机 工拙灯:液压泵电动机得电,指示灯亮;犯示灯燃烧。建议液压泵控制曝制系统与电机电动机、边刷电动机、圭动机、风 机电动机进行互锁控制,防止运输垃圾箱时其它工酌卧及其他工字霉ぷ貉贡玫缍建议行车驱动电动机与液压泵电动机不进行馈电控制,叶垃圾箱时也许 需要车位距离微祷旦互锁,攒实现车位调整。②三位四通自复位手动控制阀:先导式三位四通自复位手动控制阀,手动贤贫Ц耍貉垢赘松斐贫嗬胗胍貉垢锥瘸烧龋屏οВ 杆自动到抱闸,液压缸停止不动;拉动液压油缸,液压杠杆爽拉力消失,阀 杆自动到抱闸,液压缸停止不动。3.8.照锚县制(组合开关进行控制)应设定行车照芒转暇灯、倒车灯和倒车警告乙内照茫 行车照煤自动控制,可更改夜行指示跟远近光控制。注意需更改车盒兄甘镜啤 转暇灯:手动控制,频闪;驾驶室控制板绿色频闪指示灯指示右转 方箱鸣凭转暇灯亮。建议转暇灯与捉侧工拙灯不采取 一灯多用方法,优点是扫地车工撞能消车辆表锚弯,避免工鬃淦渌盗疚薹ū姹钡闶嵌嗔艘蛔樽镜啤 倒车灯和倒车警告抑动控制。只有车控钥匙在 ON 位置,且档杆推到倒 车档位时,倒车指示灯亮,同时倒车警告沂夷谡彰菏侄刂啤5背悼卦砍自 ON 位时,手动控制室内照没铡3.9.工作灯能在车顶设置工赚在晚间工自前方工庄照弥动开 关控制。
建议工宗驾驶室内设计有自动自锁机械式控照谜每刂剖直四、硬件整体设计输入4.1.电机控制部分(1)直立驱动马达 采用额定电压 2500 W 直立电机,48V55A,峰值输砎100A。采用 3 管并联方案,采集两相交粱相直列控制。采集母线电压。采集慌号。 (2)风扇及圭机采用额定电压 800W 直立电机,48V20A,峰值输砎40A。采用单管方案控 制,采集输承保护,单溪,带硬痞能(输彻缓慢递裕 (3)边刷电机 4 个配备额定电压 100W 直立电机,48V3A,峰值输砎10A。采用单管方案控制, 采集输承保护,单溪,带硬痞能(输彻缓慢递裕 (4)举升电机 4 个配备额定电压 100W 直立电机,48V3A,峰值输砎10A。采用单管方案控制, 采集输承保护,可双闲(输炒能变换),带硬痞能(输彻缓慢递 裕 (5)液压泵电机采用串励直立电缆,2200W,48V50A,峰值输砎100A,采用 3 管并联方案,采 集输承保护,单闲,带硬痞能(输彻缓慢递裕 (励磁是藩控制?)4.2.其他用途部分(1)采集档位信号,包括:前进、孩刹车。 (2)采集工庄信号、风扇控制信号、水泵脾闸液压婆号 (3)采集一路油门踏板信号,5V 供电,输入信号幅值 0~5V。
(4)自带一路 DCDC,输矨12V。 (5)预邻及 CAN 通信功能 (6)提供 RTC 实时时钟,实时提供运行时间、故障状况等参数 (7)电机驱动选用模块化设计,可以便捷更换故障模块,如 2.5kw 电机电流部分为一缚椋? 跟一搁,等。 (8)要迁电机都应该电沥功能,可以借助 IO 采集进 DSP,花过 AD 输入 到 DSP。
本文来自电脑杂谈,转载请注明本文网址:
http://www.pc-fly.com/a/dianqi/article-131126-1.html
 SSD固态硬盘到底要分区吗?怎么维护好呢?
SSD固态硬盘到底要分区吗?怎么维护好呢? 为什么抽油烟机闻起来不好?您是否安装了烟道止回阀?
为什么抽油烟机闻起来不好?您是否安装了烟道止回阀? 海尔大金海信日立空调不二工机电子膨胀阀FUJIKOKI ED
海尔大金海信日立空调不二工机电子膨胀阀FUJIKOKI ED 网上对win7系统使用硬盘安装器设置的零散处理方法
网上对win7系统使用硬盘安装器设置的零散处理方法
其他都搜不到